 |  |
Technical Reference information for Pathfinder
There is a newer version of this document. To view the latest version, click here.
Thunderhead Engineering makes no warranty, expressed or implied, to users of Pathfinder, and accepts no responsibility for its use. Users of Pathfinder assume sole responsibility under Federal law for determining the appropriateness of its use in any particular application; for any conclusions drawn from the results of its use; and for any actions taken or not taken as a result of analyses performed using these tools.
Users are warned that Pathfinder is intended for use only by those competent in the field of egress modeling. Pathfinder is intended only to supplement the informed judgment of the qualified user.
The software package is a computer model that may or may not have predictive capability when applied to a specific set of factual circumstances. Lack of accurate predictions by the model could lead to erroneous conclusions. All results should be evaluated by an informed user.
All other product or company names that are mentioned in this publication are tradenames, trademarks, or registered trademarks of their respective owners.
Throughout this document, the mention of computer hardware or commercial software does not constitute endorsement by Thunderhead Engineering, nor does it indicate that the products are necessarily those best suited for the intended purpose.
This work was partially funded by a Small Business Innovative Research (SBIR) grant by the United States National Science Foundation (NSF).
We would like to thank Rolf Jensen and Associates for their assistance with testing and other suggestions that helped guide the development of the simulator.
In addition, we would like to thank all the beta testers who contributed feedback on the web forums and via email.
Pathfinder is an agent-based egress simulator that uses steering behaviors to model occupant motion. It consists of three modules: a graphical user interface, the simulator, and a 3D results viewer.
Pathfinder provides two primary options for occupant motion, SFPE mode and Steering mode.
Pathfinder is included in the NIST Review of Evacuation Models (Kuligowski, Peacock, and Hoskins 2010), but the most current set of features and capabilities may not be reflected in that document.
In the following discussions, it is often useful to have an example with which to illustrate particular points. One frequently referenced example is Test 10 from the International Maritime Organization (IMO) (IMO 2016).
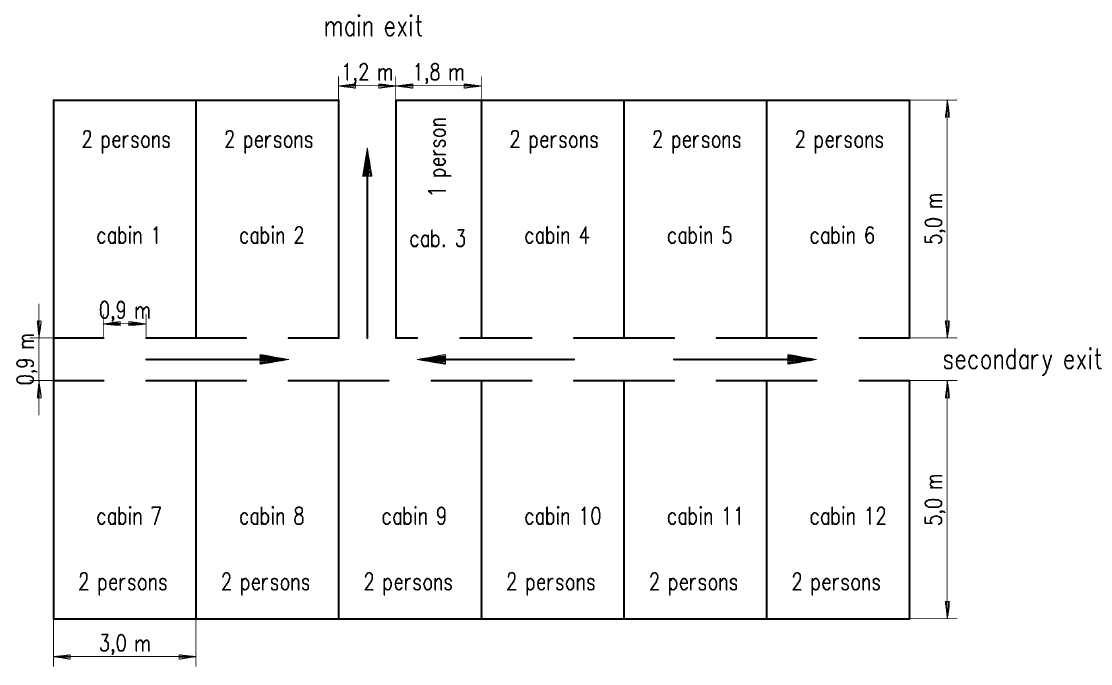
This test problem represents a cabin corridor section as shown in Figure 1, the cabins are populated as indicated.
The population consists of males 30-50 years old with a minimum walking speed of 0.97 m/s, a mean speed of 1.30 m/s, and a maximum speed of 1.62 m/s.
There is no delay in response and the walking speeds are distributed uniformly between the minimum and maximum to the 23 occupants.
The passengers in cabins 5 and 6 are assigned the secondary exit; all the remaining passengers use the main exit.
The expected result is that the allocated passengers move to the appropriate exits.
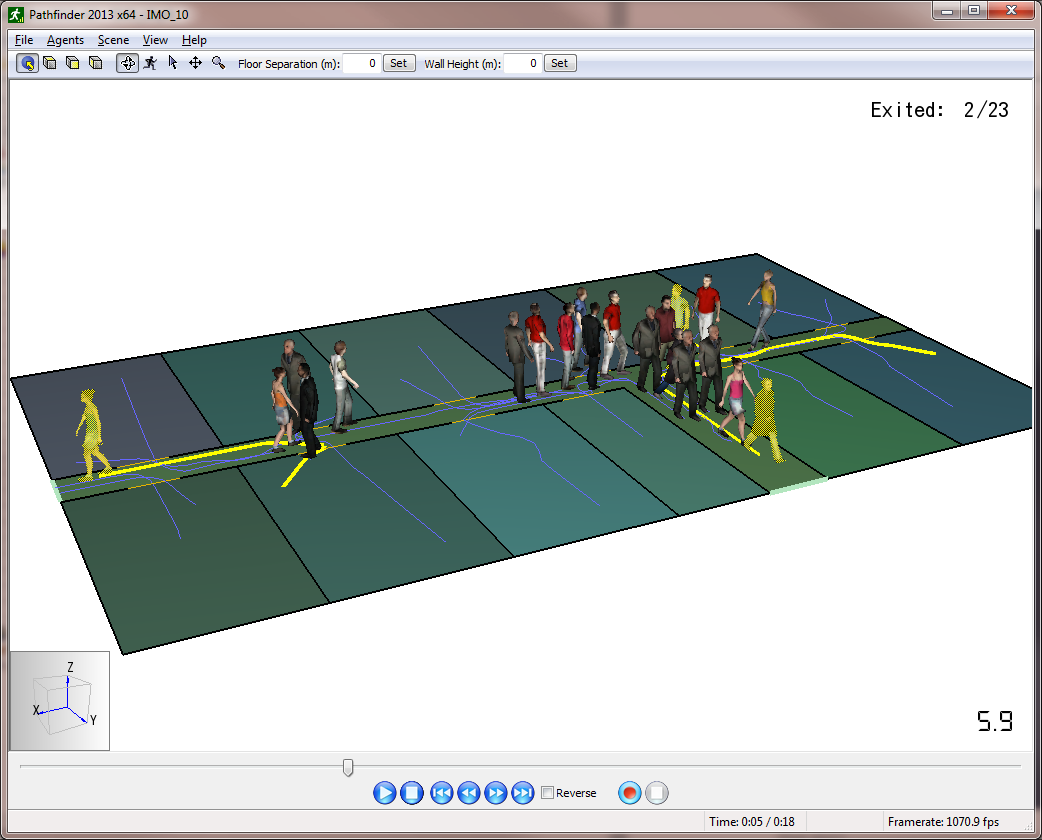
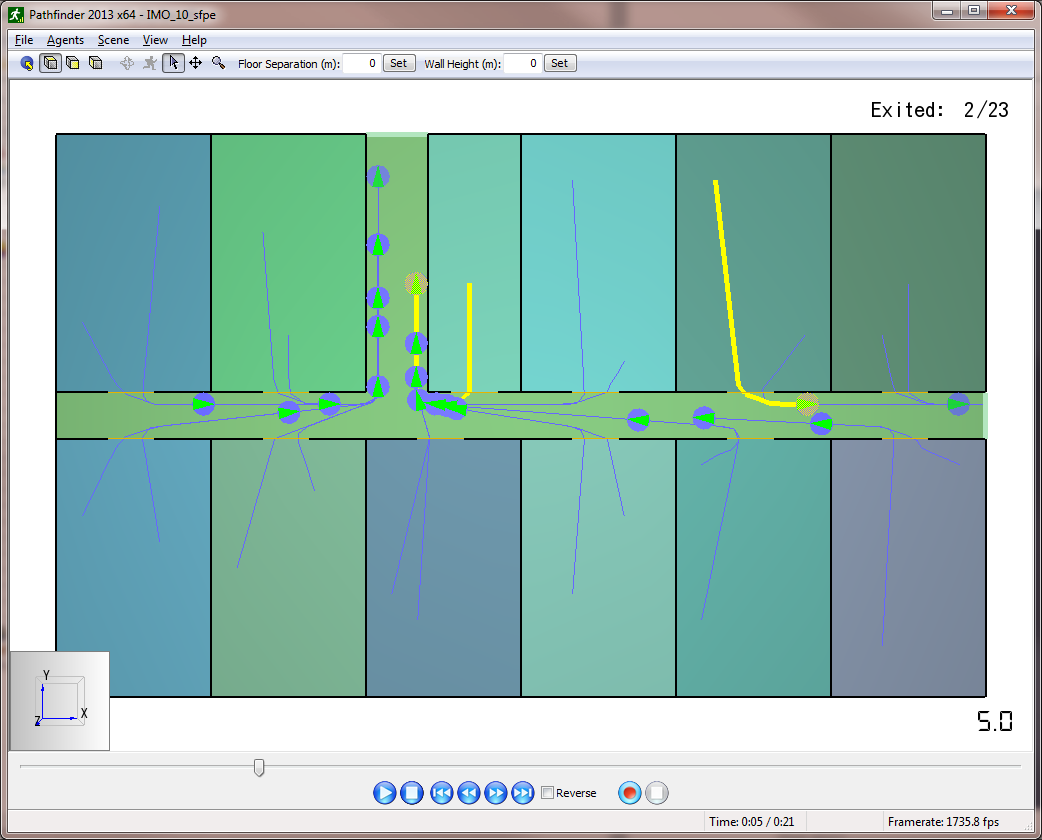
The display of occupant movement, Figure 2, does show that occupants have selected the assigned exits.
In this display, the paths of all occupants are displayed, with selected occupants and their paths highlighted.
For the steering mode analysis, all occupants exited the corridor in 18.0 seconds.
The results for SFPE mode are illustrated in Figure 3. In SFPE mode, the passengers form a queue at the main exit and the flow through this door controls the exit time. For the SFPE analysis, all occupants exited in 21.2 seconds. In SFPE mode, occupants can overlap in space during movement and when the queue forms.
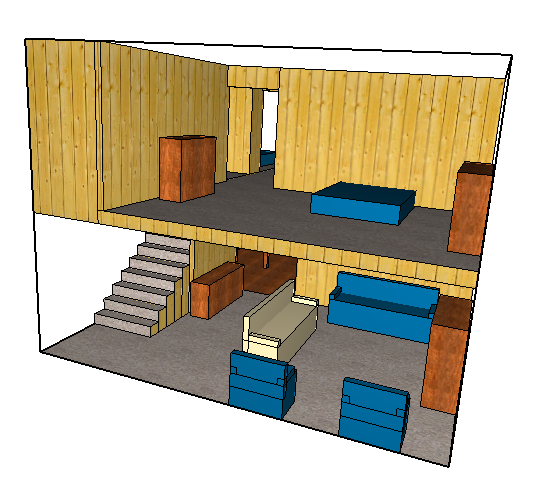
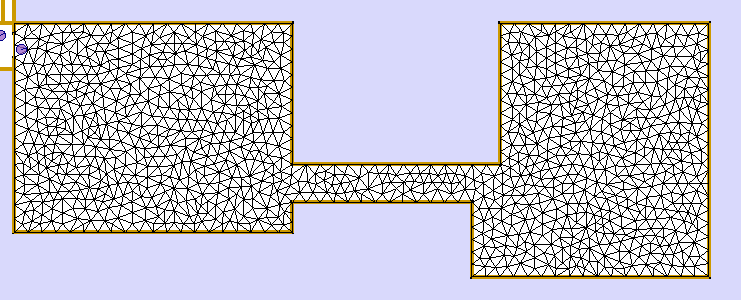
Pathfinder uses a 3D geometry model (Figure 4). Within this geometric model is a navigation mesh defined as a continuous 2D triangulated surface referred to as a "navigation mesh". The navigation mesh is an irregular one-sided surface represented by adjacent triangles. Occupant motion takes place within the boundaries of this navigation mesh.
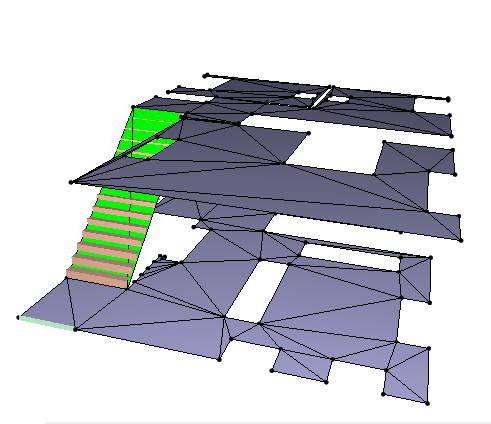
Figure 4 shows a townhouse model and the corresponding navigation mesh in Figure 5. Pathfinder supports drawing or automatic generation of a navigation mesh from imported geometry - including Fire Dynamics Simulator (FDS) files, PyroSim files, and a collection of other common CAD file formats.
| |
As can be seen in Figure 5, obstructions in Pathfinder are represented implicitly as gaps in the navigation mesh.
Since occupants can only travel on the navigation mesh, this technique prevents the overhead of any solid object representation from affecting the simulator.
When the navigation mesh is generated by importing geometry, any region of the mesh blocked by a solid object is automatically removed.
For overhead obstructions, the mesh generator considers any obstruction within 1.8 meters (6 feet) of the floor to be an obstacle.
The navigation geometry is organized into rooms of irregular shape. Each room has interior (optional) and exterior _boundaries_ that cannot be crossed by an occupant.
Travel between two adjacent rooms is through connecting doors. A door that does not connect two rooms and is defined on the exterior boundary of a room is an exit door. There can be multiple exit doors in a model. When an occupant enters an exit door in SFPE mode, they are queued at the door and removed at the flow rate defined by SFPE. Occupants that enter an exit door in reactive steering mode are removed from the simulation immediately.
Figure 6 illustrates these concepts for the IMO Test 10 problem. The rooms (and corridors) are shaded different colors. Doors from individual rooms to the corridor (just another room in the model) are indicated by a thick orange line. Exit doors are indicated by a thick light green line. Occupants are shown by the blue dots. Superimposed on the geometry is the navigation mesh.

Any location on the navigation mesh can be categorized as one of four terrain types: open space, stairs, doors and exit. Ramps and rooms are both classified as open space. Each terrain type has an effect on the behavior of occupants on that section of the mesh.
The open space within a Room provides no explicit constraints on movement. Rooms created in the user interface using the room drawing tools are all considered open space having level terrain, even if rotated so that they have slope. In SFPE mode, the maximum walking speed of occupants becomes a function of the occupant density in the room.
Stairways connect rooms on different levels. They denote areas where the maximum occupant velocity is controlled by an alternate calculation specific to stairways. The specific velocity calculation is given in the stairway section for each simulator mode.
At the top and base of each stairway, there are two doors. While the user can edit the width and activation events for the doors, the doors cannot be directly moved or deleted independently of the stair. These doors connect the stairway mesh to the adjacent rooms' meshes and function identically to ordinary connecting doors.
Like doors, stairs can normally be traversed in either direction, but they can also be marked as one-way. The simulator models this by making both doors on the ends of the stair one-way.
Each stair has associated step rise and step run properties, which are settable in the user interface. This rise/run does not have to match the geometric slope of the stair. This is important as it relates to the calculation of an occupant’s speed on stairs as discussed in Velocity.
Ramps are created and represented very similarly to stairs in a Pathfinder model, but they are treated very differently in the simulation. Like stairs, ramps have two doors at either end and can be made to be one-way. Unlike stairs, however, ramps do not affect the speed of occupants when using the default SFPE ramp speed calculations. When using a custom ramp speed function, the input slope is geometric and cannot be entered by the user.
Doors connect two adjacent rooms together. In SFPE mode they act as the main flow control mechanism, as discussed in Movement through Doors, but in steering mode, doors merely record the flow between rooms for results viewing unless explicitly set to limit flow.
Normally, occupants can travel through doors in either direction; however, in the user interface the door can be marked as one-way. This limits occupants to travelling through the door in only the indicated direction unless the occupant’s profile dictates otherwise.
Exits are a special case of doors that mark building exits. They will be colored a bright green color to indicate an exit door instead of an interior connecting door which will be a tan color.
Each occupant has a behavior assigned to them in the user interface. A behavior dictates a sequence of goals that the occupant must achieve in the simulation.
There are two main types of goals in Pathfinder:
When occupants idle, they wait until an event occurs. While the occupant is waiting in SFPE Mode, they stand still until the event occurs. While the occupant is waiting in Steering Mode, they use separation to maintain a distance from other occupants (see Idle Separate).
Because the occupant may move in Steering Mode, they are assigned a containment area that depends on the previous seek goal in the occupant’s behavior. If the occupant leaves this area because of separation, they create and use a temporary seek goal to return to the area.
The areas are defined as follows:
When an occupant seeks, they are trying to find a destination on the mesh. The occupant uses path planning, path generation, and path following to reach the destination as discussed in Pathfinding.
The following are the types of goals in Pathfinder. Some have a corresponding behavior action in the user interface, while others may be created as sub-goals of a particular behavior action.
In the user interface, an occupant may be assigned a Goto Refuge Rooms behavior action. There is no corresponding goal in the simulator, however. For unassisted agents, this merely becomes a Goto Rooms goal.
For assisted clients, however, they are assigned the following sequence of goals:
In steering mode, when occupants are instructed to go to a room and wait, the occupants will try to fill the room to ensure other occupants may also enter it.
Room filling may be triggered by any of the following scenarios:
In order to fill a room, occupants go through a series of steps:
The first step of room-filling is to acquire a door distance map that indicates how far away a door is for any point in the room. This map is generated by sub-dividing the room into smaller triangles as shown in Figure 7. For each vertex of the sub-divided triangle, a distance value is generated that is the minimum distance to a set of doors. A color-mapped version of this distance map is shown in Figure 8.
 | 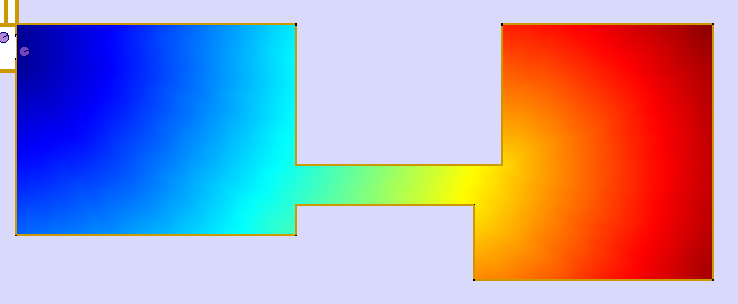 |
The set of doors used to generate the distance map varies per-occupant based on whether the occupant can move in the room. For assisted occupants who cannot move on their own and will be left in the room, the set includes all doors attached to the room. For all other occupants, the set only includes doors that are active. An active door is one that has occupants waiting to enter on the other side or that has had an occupant pass through into the current room in the past 15 seconds. The occupant will periodically check to see if the door distance map has changed and update their decisions accordingly.
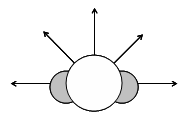
Once the occupant has obtained the door distance map, the occupant determines an ideal seek direction.
To do this, the occupant creates sample directions that are 30° apart from each other covering a full 360°. For each sample direction, the occupant samples the distance map to find the maximum door distance that can be obtained in that direction and how far it is to that location. Then the occupant checks to see if they will collide with other occupants in that direction and how far it is to the collision. The occupant then limits the distance that can be travelled in that direction to the minimum of the distance to an occupant collision and distance to the maximum door distance.
The occupant chooses the sample direction that will give the farthest distance from a door according to the door distance map.
Once the ideal seek direction has been obtained, the occupant determines whether to actually move in that direction or simply stay where they are.
If the occupant is assisted, cannot move on their own, and will be left in the room, they will always move in the ideal seek direction. Otherwise, the occupant will only move if there are other occupants within 1 meter and who are on the negative side of a plane. The plane is determined by the occupant’s location and ideal seek direction.
When an occupant has a destination to seek set by a Goal, they need a plan for how to reach the destination, a path to follow, and a way to follow the path while accounting for dynamic obstacles along the path, such as other occupants.
There are two modes that Pathfinder can use for simulating the movement of occupants through the model.
Path planning is the process of determining a plan for moving toward a destination.
Given an occupant seeking a destination, there may be multiple paths to reach the destination, each with differing lengths, numbers of occupants along the way, and various hazards. A naïve path planning approach to choosing a route would be to take the shortest route. This may not be the fastest or best route to the destination for a particular occupant, for this they need to find the path out of a room in the least amount of time. In Pathfinder this is solved by the Locally Quickest method.
The occupant uses the following steps to plan a path.
Generate a list of local targets. By default, the local targets include the doors attached to the occupant’s current room that can lead to the seek goal.
If the seek goal is in the current room, it is added to the list of local targets.
Locally Quickest is the path planning approach used in Pathfinder to solve this problem. It plans the route hierarchically, using local information about the occupant’s current room and global knowledge of the building. It is assumed that an occupant knows about all doors in their current room as well as the queues at those doors. It is also assumed that the occupant knows how far it is from one of those doors to the current destination (seek goal). Locally quickest then uses this information to choose a door in the current room based on a calculated cost of that door. A path is then generated to the door, which the occupant can follow.
As mentioned in step 2 of the path planning process, the occupant chooses a local target by calculating a cost for the target and choosing the target with the lowest cost. The cost for each target is based on multiple criteria and the occupant’s preferences.
The criteria are as follows:
If the target is a door, this is an estimate of the time the occupant will have wait in the queue at the door based on the occupant’s position in the queue and the flow rate of the door. If the target is not a door, the queue time is 0. The flow rate through doors is calculated using a bi-quad low-pass filter with a cut-off frequency of .05 Hz. Unless there is counterflow at the door, the flow rate as seen by the occupant is clamped so that it will never be less than min_flowrate_factor * door_nominal_flow. min_flowrate_factor is settable in the user interface as Minimum Flowrate Factor, and door_nominal_flow is the nominal flow rate of the door as calculated by SFPE.
The time it would take the occupant to travel from the target to the current seek goal at the occupant’s maximum speed, ignoring all other occupants. If the target is the current seek goal, this time is 0.
Each occupant also has a set of door choice preferences that are settable in the user interface.
These preferences are:
The cost of a particular target is then calculated as follows:
\(C_{target} = C_{l} + C_{g}\)
\(C_{g} = {p_{d}k_{gt}t_{gt}}\)
\(C_{l} = \text{max}\left( p_{d} k_{lt} t_{lt} | k_{qh} k_{q} t_{q} \right)\)
\(p_{d} = e^{k_{d} d_{t}}\)
\(k_{d} = \frac{\log 2}{k_{dd}}\)
In the equation above, \(k_{qh}\) is set to 1.0 - p for the most recently chosen target and 1.0 for all other targets.
Each occupant chooses a door using this technique when they first enter a room. The second door choice in the room is randomized per-occupant between 0 to 1 second later. The third and subsequent door choices occur at intervals of 1 second from the second door choice.
Occupants are only aware of queue sizes and door flow rates in their current room. When they enter a new room, knowledge about the last room is replaced by knowledge about the current room. Without any sort of backtrack prevention in place, large queues could lead to occupants walking back-and-forth between two rooms, potentially for long periods of time (until the previous room emptied).
In Pathfinder, once an occupant manages to exit a room using a particular exit door, they are committed to that routing decision using the following rules:
Once a local target has been chosen through path planning, a path is needed to reach the target. Pathfinder uses the \(A*\) search algorithm (Hart, Nilsson, and Raphael 1968) and the triangulated navigation mesh. The resulting path is represented as a series of points on edges of mesh triangles. These points from \(A*\) create a jagged path to the occupant’s goal.
To smooth out this jagged path, Pathfinder then uses a variation on a technique known as string pulling (Johnson 2006). This re-aligns the points so the resulting path only bends at the corner of obstructions but remains at least the occupant’s radius away from those obstructions.
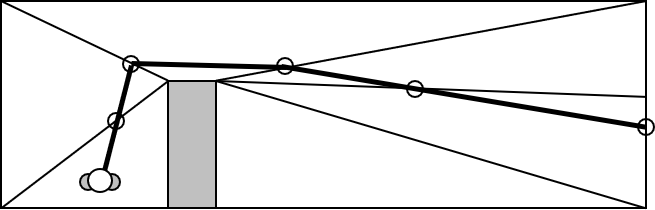
Examples of these generated points, called waypoints, are shown in Figure 9. This example shows the projected path of an occupant in a simple rectangular room. The occupant is standing in the lower-left corner and plans to exit out the lower-right corner. The navigation mesh is shown by the thin lines that form triangles inside the rectangular area. An obstruction prevents the occupant from walking straight to the exit. The planned path of the occupant is shown as the dark line and the waypoints are shown as circles. A waypoint is generated for each edge that intersects the path.
Once these waypoints are found, Pathfinder removes intermediate points that lie between two others in a straight line. This creates a series of waypoints only where the direction of travel will change.
Once a path is generated, the occupant needs a way to follow the waypoints.
The occupant performs the following:
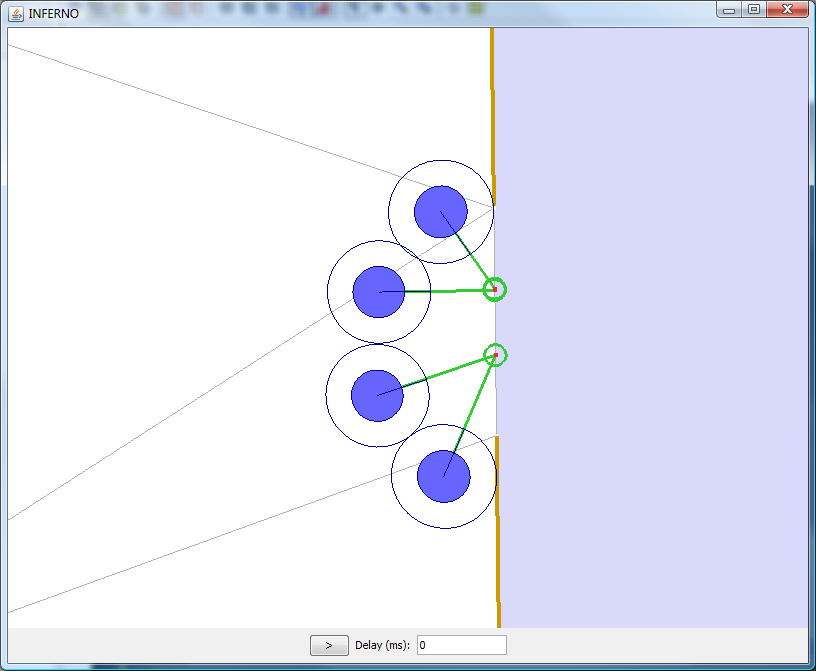
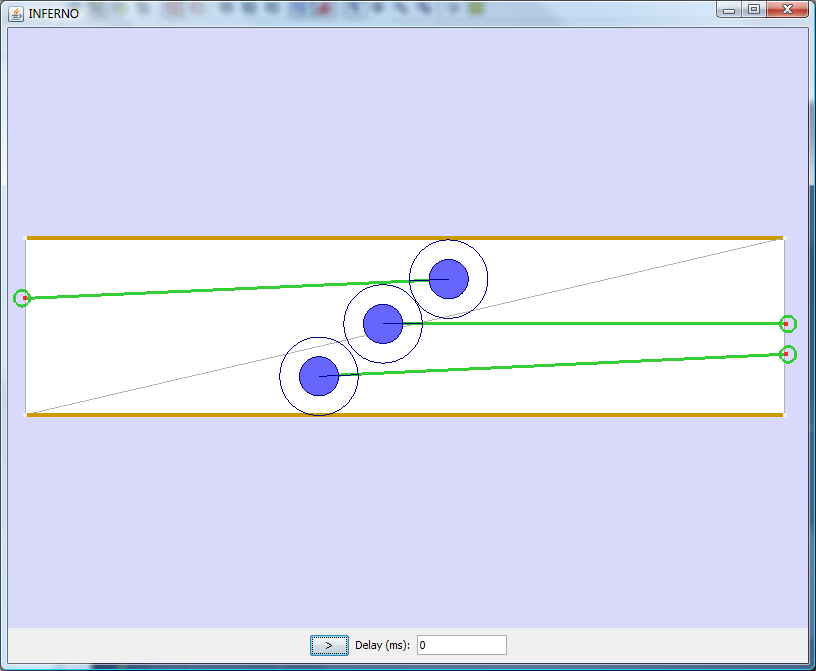
The following images show the paths and waypoints for the IMO Test 10 problem for both SFPE (Figure 10) and Steering (Figure 11) modes. The green lines indicate the current seek curves for each occupant. The red lines and points indicate future paths and waypoints. Notice the straight seek curve in the SFPE mode as compared to the spline used in steering mode.
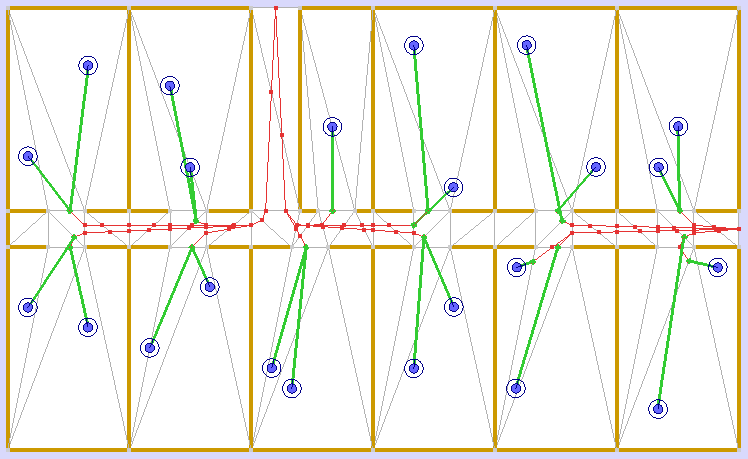 | 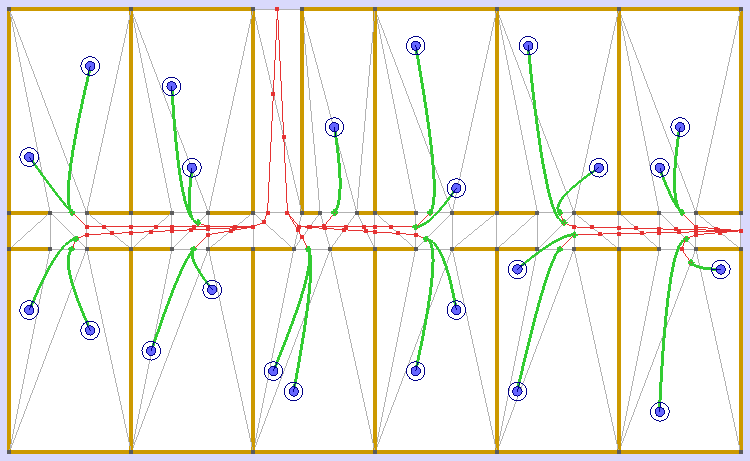 |
Pathfinder provides the option to calculate motion in an SFPE Mode. This mode implements the flow-based egress modeling techniques presented in the SFPE Handbook of Fire Protection Engineering (SFPE 2016) and the SFPE Engineering Guide: Human Behavior in Fire (SFPE 2019). The SFPE calculation as described in the handbook is a flow model, where walking speeds and flow rates through doors and corridors are defined.
In Pathfinder, navigation geometry can be grouped into three types of components; rooms, doors, and stairs. Rooms are open space on which occupants can walk. Doors are flow limiters that connect rooms and stairs. Stairs can be thought of as specialized rooms in which the slopes of the stairs limit the speed of the occupants. There is no specialized corridor type as in the SFPE guide. Instead, corridors are modeled as rooms with doors on either end. In this manner, corridors are handled in the same manner as rooms, with the flow being controlled by the doors.
In SFPE mode, multiple occupants can occupy the same point on the navigation surface.
In SFPE Mode, the following parameters are used.
This value controls the effective width of every door in the simulation - including doors associated with stairs. The effective width of a door is \(W-2*BL\) where \(W\) is the actual width of the door. The effective width of a door controls the rate at which occupants can pass through the door.
The velocity (\(v\)) at which an occupant moves depends on several factors, including the occupant’s maximum velocity (\(v_{max}\)) specified in the user interface, the type of terrain being travelled on, speed modifiers and constants associated with the terrain, and occupant density in the current room.
The occupant’s base speed (\(v_{b}\)) is defined as a function of density, terrain, and a speed fraction curve based on the SFPE fundamental diagram. It does not take terrain speed modifiers or constants into account.
\(v_{b} = v_{max}*v_{f}\left( D \right)*v_{ft}\)
Where:
\(v_{max}\) is the occupant’s maximum speed as entered in the user interface as Speed.
\(v_{f}(D)\) is a speed fraction as a function of density as follows:
\(v_{fmin}\) is a minimum speed fraction as defined in the user interface (default=.15), and \(D\) is the occupant density in the current room.
\(v_{ft}\) is a speed fraction that depends on the type of terrain being traversed by the occupant.
It is defined as:
\(v_{ft} = \frac{k}{1.4}\)
For level terrain (rooms) and ramps, \(k = 1.40 m/s\).
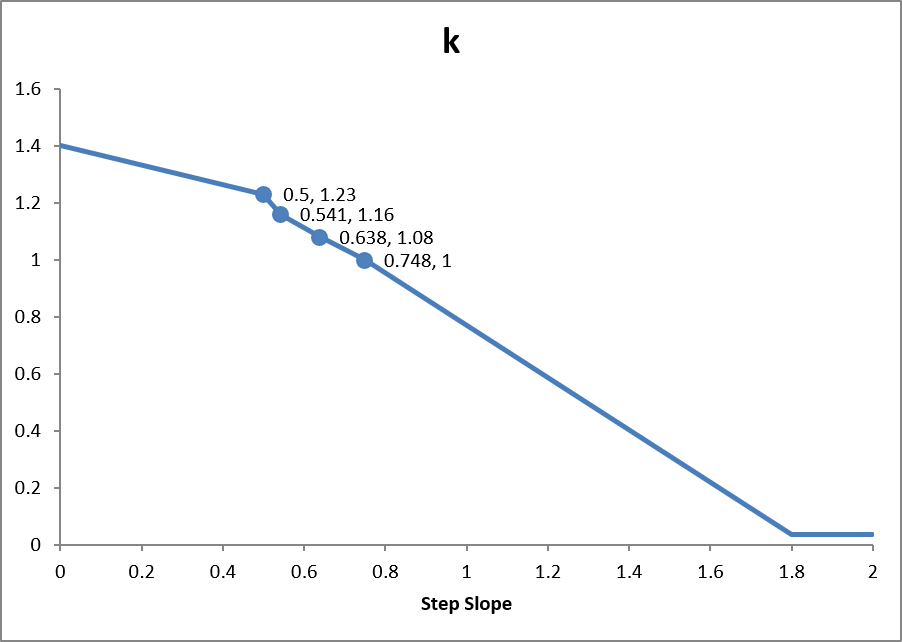
For stairs, \(k\) depends on the step slope of the stairway. The SFPE handbook defines \(k\) only for a limited set of known step slopes as follows:
| Stair Riser (inches) | Stair Tread (inches) | k |
|---|---|---|
| 7.5 | 10.0 | 1.00 |
| 7.0 | 11.0 | 1.08 |
| 6.5 | 12.0 | 1.16 |
| 6.5 | 13.0 | 1.23 |
Pathfinder uses this information to determine \(k\) values for any stairs by constructing a piece-wise linear function that maps step slope to k values using these known data points.
The step slope of a stair is defined as:
\(\text{step slope} = \frac{\text{stair riser}}{\text{stair tread}}\)
For step slopes above .75 (the maximum in the table), the values are extrapolated down to a minimum k of .034.
This ensures that very steep stairs do not cause occupants to become excessively slow.
For step slopes below .5 (the minimum in the table), \(k\) is linearly interpolated to 1.4 at a step slope of 0 (while not realistic, this would correspond to a flat stairway).
This produces a \(k\) function as shown in Figure 12.
In SFPE mode, density is considered uniform throughout a single room. It is calculated as follows:
\(D = \frac{n_{pers}}{A_{room} - A_{blayer}}\)
\(n_{pers}\) is the number of occupants in the room
\(A_{room}\) is the area of the room
\(A_{blayer}\) is the area of the boundary layer, which is calculated by multiplying the total length of the boundary edges in the room by the Boundary Layer as set on the Behavior tab of the Simulation Parameters dialog under Door Flow Rate when SFPE mode is selected.
Egress components, such as rooms, stairs, and ramps, can be assigned speed modifiers and speed constants in the user interface, which can be used to emulate environmental effects, such as smoke, and specialized navigational geometry such as escalators and moving walkways. By default, all egress components have a speed modifier of 1.
When an occupant enters an egress component with a speed modifier, the occupant’s speed on that component is calculated as follows:
\(v = k_{v} + v_{b}\)
where \(k_{v}\) is the speed modifier for the component, and \(v_{b}\) is the occupant’s base speed on the component.
If the component has a speed constant instead of a speed modifier, the occupant’s speed depends on the occupant’s profile parameter, Walk on Escalators, and the speed constant value.
If Walk on Escalators is turned on or the speed constant’s value is 0, the occupant’s speed is:
\(v = v_{c} + v_{b}\)
Where \(v_{c}\) is the speed constant for the component.
Otherwise, the occupant’s speed is:
\(v = v_{c} \)
When using Pathfinder in SFPE Mode, the occupant flow rate through the door is specified by the SFPE guidelines. This is implemented using a delay timer that controls how quickly occupants are allowed to pass through the door. This timer is initially set at zero. When an occupant passes through the door, the simulator calculates a delay time based on the specific flow of the door. That delay time is added to the door and must elapse before another occupant is allowed to pass through.
Each door may have a different specific flow depending on the direction occupants are going through the door and the type of terrain connected to the door. The specific flow for a particular direction through a door is
\(F_{s} = \left( 1 - .266 * D \right)*k*D\)
The evacuation speed constant, \(k\), depends on the terrain of the previous room, and \(D\) is the maximum of the occupant densities in the rooms attached to the door.
Because the flow equation is quadratic, the value of \(D\) is clamped to the range [1.9, 3.0] pers/m2.
This range ensures that low densities do not slow the flow rate and that high densities do not reduce the flow rate to zero.
In the user interface, if Door Flow Rates at High Density, Use a Calculated Specific Flow is selected, the density is calculated as described above.
Otherwise, it is set to 1.88 pers/m2 to maximize the flow rate.
The time it takes \(n\) occupants to pass through a door with effective width \(W_{e}\) is:
\(T = \frac{n - 1}{F_{s}}\)
The \(n\) value is reduced by 1 because the first occupant through a door does not have to wait for a time delay.
In counter-flow situations, an occupant from \(R_{1}\) may be waiting at a queue to enter \(R_{2}\) while an occupant from \(R_{2}\) may be waiting to enter \(R_{1}\). In this case, the queues evenly exchange their next occupant and both occupants are allowed through the door. The delay time placed on the door queue becomes the sum of the delay times from each occupant’s passage, which maintains the correct flow rate for the simulation.
In SFPE mode, while occupants cannot collide with other occupants, they can still collide with walls. Collision handling is applied in two steps. The first step occurs before movement is attempted for a time step, and the second occurs during movement. For the pre-movement step, the travel velocity is adjusted to force the occupant to slide along any nearby walls. After the travel velocity is adjusted, the occupant attempts to move using this new velocity. During the movement stage, wall collisions are still possible, so the occupant will simply halt at the earliest collision.
In steering mode, Pathfinder uses a combination of steering mechanisms and collision handling to control how the occupant follows their seek curve. These mechanisms allow the occupant to deviate from the path while still heading in the correct direction toward their goal.
As an occupant moves along their path, they calculate a modified maximum velocity, \(\acute{v}_{max}\), that depends on the occupant’s current terrain, specified maximum velocity, \(v_{\max}\), and the spacing of surrounding occupants. The spacing of surrounding occupants is used to estimate an occupant density, \(D\), as described below. These parameters are then used in the equations to calculate v in SFPE mode which becomes \(\acute{v}_{\max}\).
In steering mode, both \(v_{f}(D)\) and \(v_{ft}\), which are used to calculate \(\acute{v}_{max}\), may either be left at the SFPE default or may be user-defined in the occupant profile as piece-wise linear functions. \(v_{f}(D)\) is entered as a function of occupant density and \(v_{ft}\) is entered as a function of either stair step slope or ramp slope, depending on the terrain type. Stair step slope is entered in the user interface by specifying a stair’s riser and tread. Ramp slope is determined by the normal of the triangle that belongs to a ramp node and cannot be entered directly by the user.
A triangle’s slope is calculated as follows:
\(slope = \frac{\sqrt{{n_{x}}^{2} + {n_{y}}^{2}}}{n_{z}}\)
\(n_{x}\), \(n_{y}\), and \(n_{z}\) are the components of the triangle’s normal. In addition, different \(v_{f}(D)\) and \(v_{ft}\) functions may be defined for when the occupant goes up or down stairs or ramps. This is in contrast to SFPE calculations, which use the same functions for both up and down.
Once \(\acute{v}_{max}\) is calculated, it is then used by the steering system to calculate a desired velocity vector as described in Steering.
An occupant’s acceleration is split into multiple components depending on the desired velocity vector calculated by the steering system.
A tangential forward component of acceleration is calculated as:
\(a_{fmax} = \frac{v_{max}}{t_{accel}}\)
Where \(t_{accel}\) is the occupant profile parameter, Acceleration Time.
The tangential reverse component of acceleration is:
\(a_{bmax} = 2*a_{fmax}\)
The radial component of acceleration is:
\(a_{rmax} = 1.5*a_{fmax}\)
These components are combined to determine the final acceleration vector.
To calculate \(\acute{v}_{max}\) for an occupant, the occupant density \(D\) at that occupant’s location must be known.
Pathfinder estimates the density by using the spacing of the near occupants and the average longitudinal and lateral spacing density relationship demonstrated in Chapter 3 of (Fruin and Strakosch 1987) as shown in Figure 13.
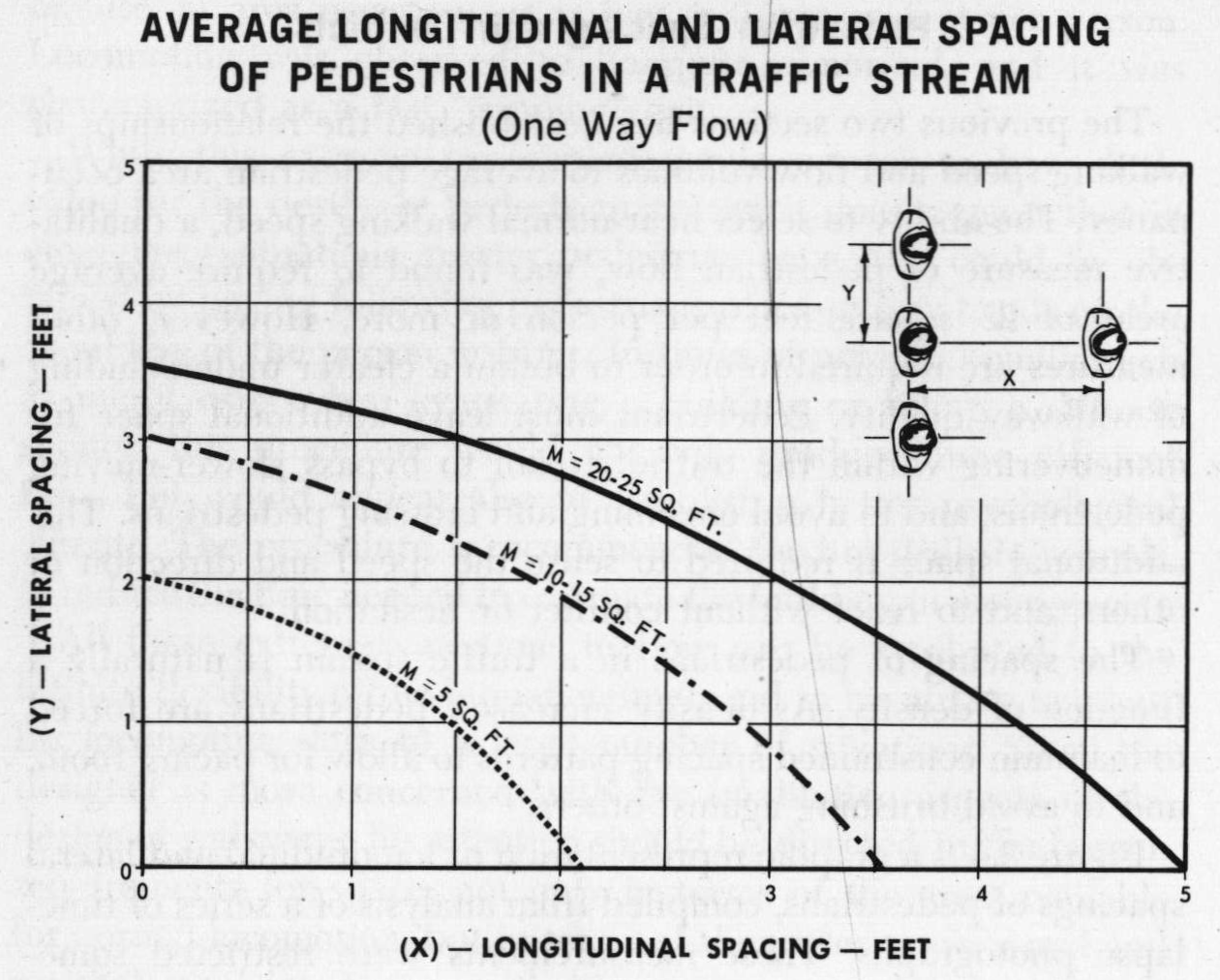
In Pathfinder, the density lines in the figure are treated as contours, each being estimated as an ellipse.
The contours are mirrored about Y=0.
To calculate the density for an occupant, the X axis in the figure is aligned with the occupant’s current velocity and the origin is set to the occupant’s location, forming a local coordinate system. Then for each other near occupant, their location is transformed to this local coordinate system. If the local coordinate for the other occupant has an x value less than 0, the occupant is ignored. This prevents an occupant’s speed from being affected by occupants behind them. For occupants with local \(x >= 0\), the density is interpolated or extrapolated from the density contours. The maximum of these densities is then used as the density for the occupant.
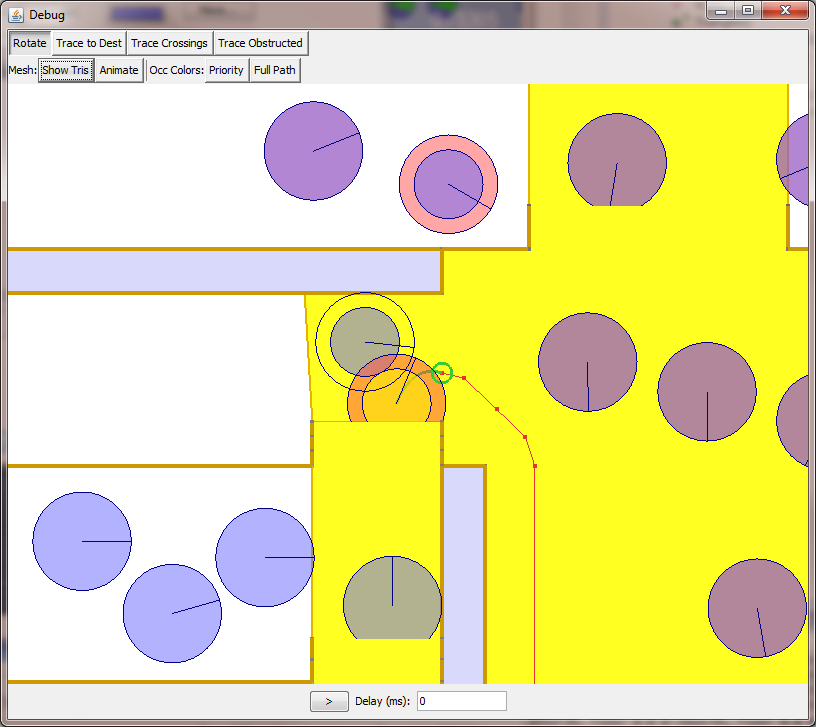
The steering system in Pathfinder moves occupants so they roughly follow their current seek curve and can respond to a changing environment. Inverse steering, used in Pathfinder, is the process of evaluating a set of discrete movement directions for an occupant and choosing the direction that minimizes a cost function. See Figure 14 for an example of sample directions. The cost function is evaluated by combining several types of steering behaviors to produce a cost. The types of steering behaviors used are determined by the occupant’s current state, and the number of sample directions is controlled by the occupant’s state and current velocity. For more information on states, see Occupant States.
Pathfinder defines several steering behaviors: seek, idle separate, seek separate, seek wall separate, avoid walls, avoid occupants, pass, lanes, and cornering. Most behaviors award a cost between 0 and 1 for each sample direction. The net cost for a direction is a weighted sum of these values.
The seek behavior steers the occupant to travel along a seek curve. Given the sample direction \(v\), and a seek curve \(sc\), the seek behavior bases its cost on the magnitude of the angle between \(v\) and the tangent to \(sc\).
The cost is calculated as follows:
\(C_{seek} = \frac{\theta_{t}}{2\pi}\)
Where \(\theta_{t}\) is the angle between \(v\) and the tangent vector to \(sc\).
The idle separate behavior steers occupants to maintain a desired distance away from other occupants and is used when occupants are in an idle state. This behavior works somewhat outside the inverse steering system, in that before considering sample directions, the separation behavior calculates a desired absolute movement vector (direction and distance).
This movement vector is calculated as the average of occupant separation vectors as follows:
\(\overline{m}=\frac{1}{n_{occ}}\sum_{i = 1}^{n_{occ}}{\overline{m_{i}}}\)
Where \(n_{occ}\) is the number of occupants by which the occupant would like to separate.
If the \(i^{th}\) occupant is idle, \(\overline{m_{i}}\) is calculated as:
\(D_{\text{gap}} = \left| \overline{p} - \overline{p_{i}} \right| - {r - r_{i}}\)
\(\overline{m_{i}}=\left(D_{\text{gap}}-D_{sep}\right)\frac{\overline{p}-\overline{p_{i}}}{\left|\overline{p}-\overline{p_{i}}\right|}\)
Where \(\overline{p}\) is the position of an occupant, \(r\) is the radius of an occupant, and \(D_{sep}\) is the desired separation distance of the occupant (settable via the input parameter, Comfort Distance).
If the \(i^{th}\) occupant is seeking, \(\overline{m_{i}}\) is instead calculated such that it is perpendicular to the \(i^{th}\) occupant’s direction of travel and its magnitude is defined as:
\(\left|\overline{m_{i}}\right|=r+r_{i}+D_{sep}-D_{path}\)
Where \(D_{path}\) is the occupant’s distance to the nearest point on the line tangent to the \(i^{th}\) occupant’s seek curve.
Once the movement vector is defined, the Separation behavior works like other inverse steering behaviors.
The cost is calculated as follows:
\(C_{isep}=1-(\overline{m_{i}}\cdot\overline{d_{s}})\)
Where \(\overline{d_{s}}\) is the sample direction.
The avoid walls behavior detects walls and steers the occupant to avoid collisions with them. This behavior projects a moving cylinder ahead of the occupant in the direction of the projected point. The cost reported by this behavior is based on the distance the occupant can travel in the direction of the projected point. It is also affected by the angle at which the occupant hits the wall. The cost is decreased if the agent will hit the wall at a shallow angle to the desired direction.
\(D_{min}=\frac{\acute{v}_{curr}\,^{2}}{2a_{bmax}}\)
\(D_{max}=D_{min}+\operatorname{max}\left\lbrack\frac{\acute{v}_{max}\,^{2}}{2a_{bmax}},\acute{v}_{curr}t_{wcr}\right\rbrack\)
\(C=1-\frac{D_{coll}-D_{min}}{D_{max}-D_{min}}\)
\(C_{aw}=\begin{cases}1, & \overline{d_{slide}}\cdot\overline{d_{des}}\leq 0 \\ C * \left ( 1-\overline{d_{slide}}\cdot\overline{d_{s}} \right ), & \overline{d_{slide}}\cdot\overline{d_{des}} > 0 \end{cases}\)
Where:
\(t_{wcr}\) is the maximum time at which an occupant will react to a wall collision (fixed at 2 s).
\(a_{bmax}\) is the maximum tangential deceleration
\(D_{coll}\) is the collision distance
\(\overline{d_{slide}}\) is the direction the agent would slide if they hit the wall
\(\overline{d_{des}}\) is the desired travel direction
\(\overline{d_{s}}\) is the sample direction.
The resulting cost is clamped from 0 to 1.
The avoid occupants behavior steers an occupant to avoid collisions with other occupants. This behavior first creates a list of occupants within a frustum whose size and shape is controlled by the velocity of the occupant. Then the behavior projects a moving cylinder ahead of the occupant in the sample direction. This cylinder is tested against another moving cylinder for each nearby occupant. If none of the moving cylinders collide the cost is zero, otherwise the cost is based on how far the occupant can travel prior to the collision. The closer this collision point, the higher the cost of the steering behavior.
The cost is based on the earliest collision with another occupant along the sample direction and is evaluated as follows:
\(D_{min}=D_{sep}+\frac{\acute{v}_{curr}\,^{2}}{2a_{max}}\)
\(D_{max}=D_{min}+\text{max}\left\lbrack \frac{\acute{v}_{max}\,^{2}}{2a_{max}},\acute{v}_{curr}t_{cr}\right\rbrack\)
\(C_{ao}=1-\frac{D_{coll}-D_{min}}{D_{max}-D_{min}}\)
Where:
\(D_{sep}\) is the desired separation distance between the occupant and the collision occupant (settable via the input parameter, comfortDist)
\(t_{cr}\) is the maximum time at which an occupant will react to a collision (settable via the input parameter, collisionResponseTime)
\(D_{coll}\) is the collision distance.
The resulting cost is clamped from 0 to 1.
The seek separate behavior spreads out occupants to maximize their travel speed as calculated by the occupant’s speed-density curve and Fruin’s spacing-density relationship (see Figure 13).
For a sample direction, the occupant’s future location along that direction is predicted using \(\acute{v}_{max}\) and the steering update interval, settable in the user interface. In addition, the locations of the surrounding occupants are predicted using their current velocity and the steering update interval. From these predicted locations, the density \(D\) is estimated as described in Estimation of Occupant Density. The speed is then predicted at that location from the density and the occupant’s speed-density curve. The predicted speed is then used to calculate the cost.
\(C_{ssep}=1-\left(\frac{v_{pred}}{v_{max}}\right)^{2}\)
Where:
\(v_{max}\) is the occupant’s maximum speed ignoring occupant density.
\(v_{pred}\) is the predicted speed.
The seek wall separate behavior steers occupants such that they want to main a boundary layer distance away from walls. Like the seek separate behavior, the occupant’s location is predicted along the sample direction using \(\acute{v}_{max}\) and the steering update interval. The nearest wall to this location is then used calculate the cost.
\(C_{swsep} = 1 - \frac{d_{w}-r-bl}{bl}\)
Where:
\(d_{w}\) is the distance to the nearest wall (walls more than 90° from the sample direction are ignored)
\(r\) is the occupant’s radius
\(bl\) is the boundary layer set in the occupant profile. The cost is clamped from 0 to 1.25.
The lanes behavior steers occupants into lanes when they detect that they are in counterflow with other occupants. It works by steering an occupant towards the center of mass of the occupants in front who are not in counterflow. Other occupants are considered to be in front if their center is within 60° of the tangent to the occupant’s seek curve. For these in-front occupants, the vector to their center of mass is calculated as the following:
\(\overline{v_{cen}}=-\overline{p_{occ}}+\frac{1}{n_{occ}}\sum_{i=1}^{n_{occ}}\overline{p_{i}}\)
Where:
\(\overline{p_{occ}}\) is the location of the occupant
\(n\) is the number of occupants in front
\(\overline{p_{i}}\) is the location of the \(i^{th}\) occupant in front.
The cost, \(C_{lanes}\), for the lanes behavior is determined in the following order:
The pass behavior steers occupants so that they prefer to walk behind faster moving occupants. For each sample direction, the occupant calculates a collision with other occupants in that direction, treating the other occupants as stationary. If a collision is detected, the cost is calculated using the nearest collision as follows:
\(C_{pass}=1-\frac{v_{o}}{v_{max}}\)
Where:
\(v_{o}\) is the speed of the other occupant
\(v_{max}\) is the occupant’s maximum speed, ignoring other occupants.
The cost is clamped to the range [0-1].
The pass behavior is not used if counterflow is detected.
The cornering behavior seeks to steer agents so that they can take wide turns as part of a group without cutting in front of each other. This allows them to better utilize wide hallways/ramps with turns. To a certain extent, the avoid occupants and seek separate behaviors already achieve this, but the cornering behavior improves this.
The cornering behavior works similarly to avoid occupants, but it treats the size and positions of the nearby occupants differently when calculating intersections between occupant paths. The size of a nearby occupant is expanded by 50% and their position is moved by a distance of 150% of the occupant’s radius along their most recent steering direction.
In addition, a flow direction is calculated from nearby occupants who are in front of the occupant as follows:
\(\overline{v_{flow}}=\sum_{i=1}^{n}\overline{d_{if}}\)
Where:
\(n\) is the number of nearby occupants in front
\(\overline{d_{if}}\) is the direction that the \(i^{th}\) occupant is facing.
The cost, \(C_{cnr}\), is calculated as follows:
The final cost for a sample direction is a weighted sum of the individual behavioral costs:
The weights depend on the occupant’s current state, and are defined in the following table.
| Weight | State=Idle | State=Seeking |
|---|---|---|
| wao | 1 | 1 |
| waw | 1 | 1 |
| wisep | 1 | 0 |
| wssep | 0 | 2 |
| wswsep | 0 | 1 |
| wlanes | 0 | 1 |
| wcnr | .2 | .2 |
| wpass | 0 | .5 |
Once the lowest cost direction has been determined, the steering velocity and acceleration are calculated that will move the occupant in the steering direction.
Along with a cost, each steering behavior calculates a maximum distance that should be traveled along the sample direction. This maximum distance is then used to determine the magnitude of the desired velocity, \(\overline{v}_{\text{des}}\), as follows:
\(D_{stop}=\frac{{\acute{v}_{curr}}\,^{2}}{2a_{max}}\)
\(\left|\overline{v}_{des}\right| = \left\{\begin{matrix} 0, & D_{max} \leq D_{stop} \\ v_{max}, & D_{max} > D_{stop} \end{matrix}\right.\)
\(\overline{v}_{des} = \left|\overline{v}_{des}\right| \overline{d}_{des}\)
Where:
\(D_{\max}\) is the maximum distance for the lowest cost sample direction, \(\overline{d}_{\text{des}}\) is the lowest cost sample direction, and \(\overline{v}_{\text{curr}}\) is the occupant’s current velocity.
The acceleration is calculated as follows (Reinolds 1999):
\(\overline{a} = \frac{\overline{v}_{des}-\overline{v}_{curr}}{\left|\overline{v}_{des}-\overline{v}_{curr}\right|} a_{max}\)
Explicit Euler integration is then used to calculate the velocity and position of each occupant for the next time step from their steering acceleration. The velocity and position are calculated as follows:
\(\overline{v}_{\text{next}} = \overline{v}_{\text{curr}} + \overline{a}\delta t\) \(\overline{p}_{\text{next}} = \overline{p}_{\text{curr}} + \overline{v}_{\text{next}}\delta t\)
Where:
\(\delta t\) is the time step size, \(\overline{p}_{\text{curr}}\) is the current position, and \(\overline{p}_{\text{next}}\) is the position after the time step.
Depending on an occupant’s current scripted behavior, they will be in one of two states:
Occupant state has a direct effect on which steering behaviors are combined to determine the lowest cost steering direction.
When idling, the occupant combines separation, avoid occupants, and avoid walls. This allows the occupant to maintain a separation with other occupants, move away from others that might be trying to seek near them, and avoid other occupants and walls at the same time.
When seeking, the occupant combines seek, avoid occupants, avoid walls, seek separation, seek wall separation, lanes, and cornering. This allows the occupant to avoid collisions with other occupants and walls and follow their seek curve. To a limited extent, the avoid occupants behavior integrates separation, so a separate separation behavior is unnecessary. While seeking, the occupant may temporarily switch to an idle state if they sense another occupant of higher priority or they have moved in such a way that they are touching another occupant. By temporarily switching to the idle state, they are able to move away from the other occupant to maintain the desired separation.
Occupant state also affects the number of sample directions used for inverse steering.
In an idle state, 8 sample directions are tested, 45° apart, along with a "null" direction that tests standing still. This allows the occupant 360° of movement so they can easily separate from others.
When seeking, the occupant tests a different set of directions depending on the occupant’s speed. A seed direction tangent to the occupant’s seek curve is used as the starting direction. If the occupant’s speed is relatively slow, they will consider 7 more sample directions, 45° apart as when idling. If their speed is faster, the sample directions are taken 15° apart, up to 75° to either side, creating 9 sample directions. The occupant’s speed is considered "slow" if the following is true:
\(v_{curr} \leq f_{slow} \acute{v}_{max}\)
Where \(f_{slow}\) is settable via the input parameter, slowFactor, and \(\acute{v}_{max}\) is the occupant’s modified maximum velocity. In addition to the sample directions, the null direction is again considered for seeking.
Pathfinder provides a priority system that operates on discrete priority levels assigned to each occupant. When occupants encounter other occupants at the same priority level as their own, they behave as indicated above (the common case). If, however, they detect another occupant with a different priority nearby and in front of them, they will slightly alter the above behaviors.
If the other occupant is of lower priority, the occupant will not separate and will use a comfort distance of zero, effectively allowing them to push against the other occupant if necessary. Because there is no notion of occupants exerting force on one-another, the other occupant must respond accordingly.
So in the inverse case of an occupant detecting another of higher priority within their comfort distance, they will ignore their seek behavior and instead use their separation behavior, even if their goal puts them in a seek state. This allows them to back away from the occupant of higher priority, giving the higher priority occupant a chance to move through.
Priority levels are completely relative. For example, if three occupants meet having priorities of 5, 7, and 12, their behavior toward one another would be exactly the same as if their priorities were 0, 1, and 2, respectively. Occupants with higher priority values have higher priority over other occupants.
There are some scenarios where an occupant’s movement conflicts with another occupant’s movement due to limitations of the geometry. In these situations occupants must negotiate how to resolve these conflicts such that they can continue moving.
The following examples illustrate how these situations can arise:
Figure 15 - Multiple occupants are simultaneously headed in a common direction and are approaching a physically tight area that will not allow all of them to pass at once (such as a narrow door or narrow hallway).
Figure 16 - Occupants are headed in opposite directions in a crowded hallway (counterflow).
Figure 17 - Occupants have squeezed into a tight area and cannot back up, due to a wall or one-way door.
Figure 18 - Occupants are headed in opposite directions in a hallway that will not physically allow them to pass.
 |  |
 |  |
Pathfinder employs special handling to resolve these movement conflicts and prevent occupants from becoming stuck. This is handled as part of each occupant’s steering behavior as follows:
If the occupant makes progress with the newly calculated steering direction, the occupant raises their priority to this new locally-elevated priority (if not already raised) and returns the new steering calculation. If the occupant does not make progress, however, they skip to the next step.
In steering mode, an occupant obtains a free pass if at least one of the following conditions is true for all nearby occupants:
While the wall and occupant avoidance behaviors will attempt to steer around obstacles, they might not always succeed. This often occurs in crowded situations when occupants cannot avoid being pressed tightly against walls and other occupants. In these situations, additional collision handling is necessary to prevent the simulation from entering an invalid state. There are two collision handling scenarios: one in which two or more occupants collide and another where an occupant collides with the boundary of the navigation mesh (i.e. a wall).
If collision handling is turned on, the occupant will halt at the earliest collision with either a wall or another occupant for a given time step. If collision handling is off, the occupant will only halt at the earliest collision with a wall.
By default, Steering Mode simulations provide no additional constraints on occupants when they move through doors. Flow limiting can be turned on, however, either through the simulation parameter, Limit Door Flow Rate, or the Flow rate parameter on individual doors.
In Steering mode, flow limiting works similarly to that in SFPE mode. For more details, see Movement through Doors. The main differences between flow limits in the two modes are as follows:
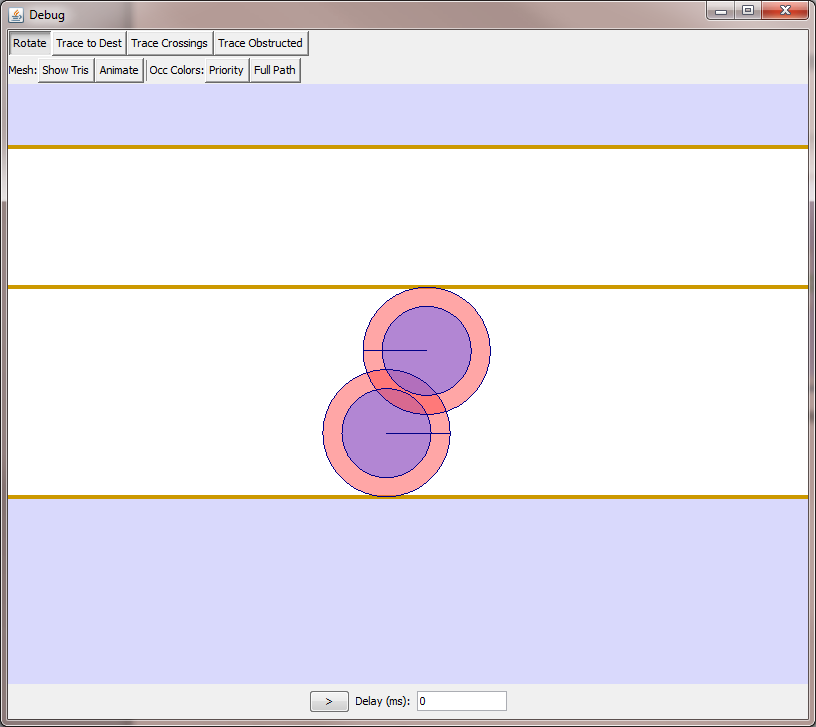
Occupants can be assigned body shapes other than the default cylinders. Any convex polygon can be used as occupants' body shape. Collision detection and avoidance of polygonal shapes is more complex than when only considering circular shapes. In this section we call occupants with polygonal shapes vehicle agents or vehicles.
Movement of vehicles is different from the movement of occupants. Vehicles are not allowed to move sideways, their rotation is restricted, and they follow a different curve.
Pathfinder is using Minkowski difference to perform collision avoidance between vehicles and walls as well as between multiple vehicles and combinations of vehicles and occupants with circular shapes.
For collision avoidance it is essential to be able to determine a distance to collision of two shapes. For polygonal shapes this distance is computed using Minkowski difference. The Minkowski difference consists of the convex hull of every point on the boundary of one shape subtracted from every point on the boundary of the other shape. It can be viewed as a process of shrinking one shape while simultaneously expanding the other. A distance from the origin to the closest point of the resulting shape is the collision distance. This method finds a collision distance of translating shapes. Since vehicles can also rotate around their origins, rotation of the shapes has to be also taken into account. Rotation is not included in the computation of the collision distance. However, collision detection (determining whether a vehicle can rotate by a certain degree without colliding) includes rotation in its movement calculations. More information about this calculation is available in "Collision detection for dummies" (Firth 2011).
In general, polygonal shapes can often appear in a state that is hard or impossible to navigate from, for example when a rectangular vehicle is touching a wall with one of its edges or when it is navigating through narrow doors or corridors. Because a developmental focus of Pathfinder is to never become stuck, vehicles are allowed to partially overlap with obstacles in difficult situations.
In an assisted evacuation scenario, assistants help clients navigate to various targets. In order to receive assistance, clients must be using a vehicle shape that has at least one attached occupant position. Assistants repeatedly select clients, help them achieve their goals, and come back to assist more clients. When requesting assistance, clients are unable to move until assistants are attached to them in all attached occupant positions of the vehicle.
In Pathfinder, assisted evacuation is implemented using agents' goals (see Behaviors and Goals for more information about goals). The following sections describe the goals assigned to agents with different roles in the assisted evacuation scenario.
This goal is specified as the Assist Occupants behavior action in the user interface. This goal allows an assistant to help all clients who are requesting or will request assistance from a particular team until all those clients have either exhausted their goals or detached from their assistants.
The following is a broad step-by-step procedure of how the assist occupants goal progresses:
For each assistant, the Assist Occupants Goal is further decomposed into three other sub-goals:
The process of assigning these goals in a multithreaded application can lead to problems such as the loss of determinism, concurrency exceptions or increased running time due to the necessary synchronization. All these issues are addressed by the coalition formation algorithm described in Coalition Formation Algorithm.
This goal is specified as the Wait for Assistance behavior action in the user interface. The procedure for this goal is as follows:
At this point, the client has attached assistants. The client then continues with their next goals as they normally would. They detach from their assistants once one of the following occurs:
Instead, a client is assigned the following sequence of goals:
Pathfinder is a multithreaded application, in which the agents decide about their movement in a pre-move step and update their state in an update step. Each one of these steps can be performed by the agents in parallel. Assisted evacuation requires the agents to coordinate and cooperate. This behavior brings multiple implementation challenges, because it requires deterministic interactions between agents.
The following fundamental steps are performed by the simulator engine in every step of the simulation:
Notice that the goals are updated in a similar way to the agents. These three steps must be separated in order to preserve determinism.
The following are the procedures added to Pathfinder to support assisted evacuation:
The assistant compares the pre-calculated distance to this client with the minimum of pre-calculated distances of assistants that reserved a spot with the other client. The side that has the higher distance is allowed to stay, while the other side has to cancel its reservation and switch to the other client by making a reservation in the pre-move step. In this way the assistants together minimize the distance to the client they are going to assist.
Elevators in Pathfinder are composed of a discharge node and any number of elevator levels. Rather than modeling elevators using dynamic geometric elements (i.e. a floor that moves up and down), Pathfinder represents elevators using ordinary rooms. here is a room at each level the elevator touches, with doors connecting the elevator rooms to each level. There is one discharge room at the discharge level. There are several pickup rooms, one at each pickup level. Occupants that have entered a pickup room are moved directly toward the discharge room, bypassing any geometry in-between. They still appear to move, however, as if they are in a moving room as they are moved toward the discharge room. Elevator rooms that are not currently being served by the elevator are blocked using closed doors.
Elevator operation can be split into three main stages:
At the start of a simulation, each elevator is idle. All doors connecting all levels to the elevator are closed, the elevator is at the discharge floor, and the elevator is waiting to be called from one of the pickup levels. Once called, it proceeds to the pickup stage.
In order for an occupant to call an elevator, they must be assigned an elevator goal. If the elevator goal specifies multiple elevators to choose from, the occupant uses a modified version of Locally Quickest to choose the best one. This version of Locally Quickest adds the elevator doors on the level closest to occupant’s location to the list of door targets. The global travel time for each elevator door reflects an estimate of the time it will take for the elevator to reach the pickup level for that door as well as the time to travel in the elevator to the discharge level and walk to the nearest exit.
Once the occupant has chosen one of the elevator doors, the occupant walks to the door. When they are within .5 m of the chosen elevator door and the elevator is in the idle state, the elevator is called. If the elevator is part of a call group, all elevators in that group are called.
When a pickup level calls an elevator, the elevator moves toward that level. If multiple pickup levels call the elevator at once, the elevator travels to the one with the highest priority as specified in the user interface. As the elevator travels toward the pickup level, it continues monitoring calls. If a call is received from a level with higher priority before the elevator reaches the current pickup level, the elevator switches pickup levels. The time to reach the pickup level is specified in the user interface.
When the elevator reaches a pickup level, it opens its doors and waits for a countdown timer to elapse. The elevator then closes its doors and proceeds to the discharge stage.
When the elevator doors open at a pickup level, the elevator begins a countdown timer, initialized to the time specified by the Open Delay input parameter. Once this timer reaches zero, the elevator doors close. While the timer is counting down and the elevator has room for more occupants, two events may occur that can affect the timer:
If one of these events occurs, the countdown timer is reset to be the larger of its current value or the Close Delay input parameter.
The process of loading an elevator and achieving the user-specified nominal load is controlled by occupants and their movement behavior rather than elevator logic. Pathfinder provides different mechanisms for achieving the nominal load depending on the simulation mode.
In SFPE mode, achieving the nominal load is fairly trivial. Usually, a room is assigned a maximum occupant density from the simulation parameters. The doors leading to that room use a gating mechanism to prevent occupants from entering if doing so would exceed the maximum density in the room. For elevator rooms, the maximum occupant density is derived from the nominal load as nominal_load/area. Because occupants can overlap in SFPE mode, no additional work is needed to ensure that the nominal load can be met.
In steering mode, however, Pathfinder requires further action to ensure the nominal load. This is because each room has a physical loading limit due to room shape, occupant size, and avoidance behavior. To allow elevators to reach the nominal load, collisions are turned off, while still allowing occupants to avoid one-another.
After the elevator is loaded at the pickup level, it moves toward the discharge level. The amount of time it takes to reach the discharge level is the same as travelling from the discharge to pickup level as specified in the user interface. Once the elevator reaches the discharge level, it opens its doors. When the elevator is empty, it closes its doors and enters the idle state again.
Pathfinder runs in a simulation loop that calculates movement at discrete time steps. For each time step, the following steps are carried out:
The simulator portion of Pathfinder can optionally use an input file to run simulations. By default, this input file is written every time a simulation takes place. This section describes the input file including its format and all parameters.
Rooms, doors, and stairways are represented by nodes. At any given time during the simulation each occupant is either inside one of the following nodes or has exited the simulation.
[nodes] name <node display index>, <animation id>, [optional: "count" <max occupant count in pers> or "dens" <max occupant density in pers/m^2>]
| name: string | Name of a node |
| node display index: int | Index of the node display properties |
| animation id: int | Index of the node animation |
| max occupant count in pers: int | Maximum number of occupants allowed in the node |
| max occupant density in pers/m2 : float | Maximum occupant density allowed in the node |
This section contains all of the vertices that will be used by the geometry (triangles and edges) in the input file.
[verts] x y z ...
| x : float | x-coordinate |
| y : float | y-coordinate |
| z : float | z-coordinate |
This section defines the walkable space within a simulation.
[navmesh] ixnode ttype ixverta ixvertb ixvertc ...
| ixnode : int | Index of the node associated with this triangle |
| ttype : string | Terrain type: [open, stair] |
| ixverta : int | Index of first vertex |
| ixvertb : int | Index of second vertex |
| ixvertc : int | Index of third vertex |
This section defines the doors that will be used if the use_door_queues option is enabled.
Associating a door entry with a node causes that node to be recognized by the simulator as a door node and prevents the density calculation from being used to control the speeds of occupants within triangles associated with that node.
This section does not define the geometric edges that the door represents.
Exit doors should define only one adjoining room and internal doors should define two such rooms. These entries are used to prevent overcrowding as occupants transition between rooms and to provide for more elaborate merge calculations.
[doors] ixnode eff_width ixnodeA ixnodeB flowrate doorDir ...
| ixnode : int | Index of the node corresponding to this door |
| eff_width : float | Effective width of this door |
| ixnodeA : int | Index of a room adjoining the door (use dash "-" for none) |
| ixnodeB : int | Index of a room adjoining the door (use dash "-" for none) |
| flowrate: float | Flowrate of the door |
| doorDir: string | Specify either "dir+" (for a positive direction), "dir-" (for a negative direction), or use dash "-" for multidirectional. |
The entries in this section represent the geometric portion of entities that are defined as edges in the NAVMESH.
[edges] etype <depends on etype> ...
| etype : string | Edge type: [boundary, door, exit_door] |
boundary ixverta ixvertb
This edge type represents a boundary that occupants will not walk across.
| ixverta : int | Index of the first vertex |
| ixvertb : int | Index of the second vertex |
door ixnode ixverta ixvertb
This edge type represents an internal door. Doors of this type will not be included in the search for the nearest exit and should have two adjoining nodes defined in the corresponding door record.
| ixnode : int | Index of the node corresponding to this door |
| ixverta : int | Index of the first vertex |
| ixvertb : int | Index of the second vertex |
exit_door ixnode ixverta ixvertb
This edge type represents an exit door. Doors of this type will be included in the search for the nearest exit and should have one adjoining node defined in the corresponding door record.
This section allows you to customize global simulation parameters. The format is a list of key value pairs.
[param] key value ...
| key : string | The name of a simulation parameter |
| value : mixed | The value for a simulation parameter (type depends on key) |
| max_time | 0 | Simulation time limit in seconds (0=infinite) |
| show_vis | 0 | Turn debugging visualization on/off (0=off, 1=on) |
| dt_init | 0.025 | Simulation time step size (s) |
| dt_vis | 0.25 | Frequency of visualization output (s) |
| dt_wall_meta | 0.5 | Frequency of simulation progress meta data (s) |
| dt_csv_data | 1.0 | CSV data print time increment (s) |
| dt_snapshot | 120.0 | |
| handle_collisions | 1 | Turn collision handling on/off (0=off, 1=on) |
| reactive_steering | 1 | Turn reactive steering on/off (0=off, 1=on) |
| inertia | 1 | Turn inertia on/off (0=off, 1=on) |
| vel_from_density | 1 | Turn density-based velocity calculation on/off (0=off, 1=on). Only applies when inertia is off. |
| density_max | 3.55 | Maximum room fill density. Only applies when door queues are active. |
| specific_flowrate_max | 1.32 | Maximum specific flowrate for doors. |
| door_flow_from_density | 1 | Turn door flowrates as a function of density on/off (0=off, 1=on) |
| door_flow_density_min | 1.9 | The lower bound on density for calculating specific flow through doors (pers / m2) |
| door_flow_density_max | 3.0 | The upper bound on density for calculating specific flow through doors (pers / m2) |
| boundary_layer | 0.150 | Boundary layer used for SFPE simulations (m) |
| min_flowrate_factor | 0.1 | Influences calculation of minimum door flowrates. Lower values improve occupant recognition of slow door queues, but can result in excessive queue switching. |
| out_summary | summary.txt | Summary of room and door clearing times. |
| out_performance | performance.txt | Summary of performance information for a completed simulation. |
| out_snapshot_base | snapshot | The base name for generated snapshots. |
| out_results | results.pfr | The 3D Results file. |
| out_occ_time_history | vis.pfd | Movie playback (time history) output. |
| out_geom_time_history | geomvis.pfg | Movie playback (time history) output for geometry. |
| out_room_usage | rooms.csv | Room usage over time. |
| out_door_usage | doors.csv | Door usage over time. |
Event entries describe events that will happen during the simulation.
[events] time event ...
| _time_float | simulation time at which the event will occur |
| event | one from the following list |
These entries are descriptions of artificial intelligence for simulation agents.
[behaviors] key value ...
Behaviors are stored in a JSON key-value format.
The supported keys are name and script.
Script contains a list of actions separated by a semicolon.
Following is a table of available actions for occupant behavior in Pathfinder.
| Action | Encoding | Example |
|---|---|---|
| Go to exit(s) | goto exit <comma separated list of exit door indices> | goto exit 1, 2 |
| Go to any exit | goto exit any | |
| Go to waypoint | goto point (x, y, z) radius | goto point (1.5, 2.5, 0.0) 1.5 |
| Go to room(s) | goto room <comma separated list of room indices> | goto room 1, 3 |
| Go to elevator(s) | goto elevator <comma separated list of elevator indices> | goto elevator 0, 1 |
| Go to any elevator | goto elevator any | |
| Wait | wait curve <curve index> | wait curve 0 |
| Wait for assistance by assisted evacuation team(s) | get_assistance <comma separated list of indices of assisted evacuation teams> | get_assistance 0, 1 |
| Fill the occupant’s current room by moving away from doors | fill_room | |
| Fill the occupant’s current room if their previous goal indicated they should | fill_room_if_necessary | |
| Detach from assistants | detach_assistants | |
| Assist occupants | assist <index of assisted evacuation team> | assist 0 |
| Add tag | tag (<tag name>) | tag (last_goal_started) |
| Remove tag | untag (<tag name>) | untag (some_tag) |
| Wait until all occupants are tagged | wait_until_all_tagged (<comma separated list of tags>) | wait_until_all_tagged (+, finished) |
| Set profile property | set_prop <key>, <value> | set_prop OccProfile.REMOVE_WHEN_FINISHED, {{val{:[{{false{:1.0}]}"} |
Example of a behavior line:
2: {"name":"Behavior01","script":"goto point (-7.0, 3.0, 0.0) 1.5; tag (last_goal_started); goto exit any"}[profiles] key value ...
This section lists all the properties defined for an occupant profile. Profiles are stored in a JSON key-value format. Following table shows available keys and values for a profile. Note that only properties with values that are not default are written in the file. Furthermore, only profiles that are used by any occupant or occupant source are written in the file.
| Key: "OccProfile._" | Value description | Value example |
|---|---|---|
| ACCEL_TIME | <index of acceleration time curve> | 0 |
| BOUNDARY_LAYER | <index of wall boundary layer curve> | 0 |
| COLLISION_RESPONSE_TIME | <index of collision response time curve> | 0 |
| COLOR | <color in RGBA 0-1 format> | [1.0,0.0,0.0,1.0] |
| CURR_DOOR_PREF | <index of current door preference curve> | 0 |
| DIST_TRAVELLED_DOUBLE_DIST | <index of current room distance penalty curve> | 0 |
| DESC | <String description of the profile> | "My profile" |
| FUNDAMENTAL | <index of speed-density profile function> | 0 |
| INIT_ORIENT | <index of initial orientation curve> | 0 |
| LOCAL_QUEUE_TIME_FACTOR | <index of current room queue time curve> | 0 |
| LOCAL_TRAVEL_TIME_FACTOR | <index of current room travel time curve> | 0 |
| MAXVEL | <index of speed curve> | 0 |
| MIN_SQUEEZE_FACTOR_CONST | <reduction factor between 0.0 and 1.0> | 0.7 |
| NAME | <name of the profile> | "Default" |
| OBEY_ONEWAY_DOORS | <whether one-way-doors should be obeyed> | [{"false":1.0}] |
| OCCMODEL | <list of occupant models with associated weights> | [{"md5 /AsWom0003 /AsWom0003. bea":0.5},{"md5 /BMan0001 /BMan0001. bea":0.5}] |
| PERSIST_TIME | <index of persist time curve> | 0 |
| PRINT_EXTRA_OUTPUT | <whether CSV data should be printed> | [{"true":1.0}] |
| PRIORITY_LEVEL | <priority level, 2 in following example> | [{"2":1.0}] |
| FUNDAMENTAL_RAMP_DOWN | <speed density ramp down function> | {"x":[0.55,3.23],
"y":[0.93,0.15],
"type":"pw",
"extrapolate":
false} |
| FUNDAMENTAL_RAMP_UP | <speed density ramp up function> | {"x":[0.55,3.23],
"y":[0.93,0.15],
"type":"pw",
"extrapolate":
false} |
| SPEED_RAMP_DOWN | <index of ramp down speed function> | 0 |
| SPEED_RAMP_UP | <index of ramp up speed function> | 0 |
| REAC_TIME | <index of reaction time curve> | 0 |
| REMOVE_WHEN_FINISHED | <whether occupants should be removed when finished> | [{"true":1.0}] |
| REQUIRES_ASSISTANCE | <whether occupants require assistance to move> | [{"true":1.0}] |
| RESTRICTED_COMPONENTS | <index of the component restrictions line in the [component-restrictions] section> | 0 |
| SLOW_FACTOR | <index of slow factor curve> | 0 |
| PROP_SPACING | <comfort distance curve> | {"val":
{"min":"0.08 m",
"max":"0.1 m",
"type":"unif"},
"type":
"COMFORT_DIST"} |
| FUNDAMENTAL_STAIR_DOWN | <speed density stair down function> | {"x":[0.55,3.23],
"y":[0.93,0.15],
"type":"pw",
"extrapolate":
false} |
| FUNDAMENTAL_STAIR_UP | <speed density stair up function> | {"x":[0.55,3.23],
"y":[0.93,0.15],
"type":"pw",
"extrapolate":
false} |
| SHAPE | <index of occupant shape> | 0 |
| SPEED_STAIR_DOWN | <index of stair down speed function> | 0 |
| SPEED_STAIR_UP | <index of stair up speed function> | 0 |
| TAIL_TIME_FACTOR | <index of global travel time curve> | 0 |
| WALK_ON_ESCALATORS | <whether occupants can walk on escalators> | [{"true":1.0}] |
Example of a profile line:
0: {"OccProfile.NAME":"Profile00","OccProfile.SHAPE":1, "OccProfile.COLOR":[0.2,0.4,0.8,1.0]}[functions] key value ...
Functions are used to map an independent variable x to a dependent variable y. Pathfinder supports two types of functions: piecewise linear and constant. Functions are stored in a JSON key-value format. Following table shows available keys and values for the piecewise linear function.
| Key | Value description | Value example |
|---|---|---|
"x" | [<comma separated list of x values>] | [0.1, 0.7, 1.5] |
"y" | [<comma separated list of y values>] | [1.9, 0.65, 2.3] |
"type" | <type of function, "pw" for piecewise linear> | "pw" |
"extrapolate" | <true/false depending on whether points that are out of scope of x values should be extrapolated> | false |
Constant function stores a single value. Following table shows available keys and values for the constant function.
| Key | Value description | Value example |
|---|---|---|
"val" | <constant value> | 0.1 |
"type" | <type of function,`"const"`for constant> | "const" |
Example of a function line:
0: {"x":[0.55,3.2779887218045123],"y":[1.0,0.15],"type":"pw","extrapolate":false}[distributions] key value ...
Distributions in Pathfinder are either curves or urns. Curves represent continuous distributions, while urns represent discrete distributions.
Following four curve types are currently supported: constant curve, uniform curve, standard normal curve, and log normal curve. Curves are stored in a JSON key-value format. Following table shows available keys and values for the constant curve.
| Key | Value description | Value example |
|---|---|---|
| "val" | <constant value> | "12.2 cm" |
| "type" | <type of curve, "cc" for constant> | "cc" |
Following table shows available keys and values for the uniform curve.
| Key | Value description | Value example |
|---|---|---|
| "type" | <type of curve, "unif" for uniform> | "unif" |
| "min" | "<minimum of the uniform interval>" | "5.5 cm" |
| "max" | "<maximum of the uniform interval>" | "6.5 cm" |
Following table shows available keys and values for the standard normal and log normal curves.
| Key | Value description | Value example |
|---|---|---|
| "type" | <type of curve, "stdNorm" for standard normal, "logNorm" for log normal> | "stdNorm" |
| "mean" | <mean value> | "6 cm" |
| "stDev" | <standard deviation> | "0.5 cm" |
| "min" | <minimum of the uniform interval> | "5.5 cm" |
| "max" | <maximum of the uniform interval> | "6.5 cm" |
Example of a curve line:
2: {"min":"45.58 cm","max":"50.58 cm","type":"unif"}Urns are also stored in a JSON key-value format. An urn line contains two keys: "urn" and "type". The "urn" key maps to an array of pairs, each pair contains a value mapped to its probability. The sum of all probabilities in an urn must be equal to 1.0. The "type" key maps to the type of variables in the urn. The following types are supported: "int" for integer values, "bool" for true/false values, "string" for string values, and "ud" for double values with units.
Example of an urn line:
3: {"urn":[{"2.0 s":0.33},{"8.0 s":0.33},{"15.0 s":0.33999999999999997}],"type":"ud"}[component-restrictions] key value ...
This section defines component restrictions for occupants and occupant profiles. Component restrictions are stored in a JSON key-value format. Following table shows available keys and values for the component restrictions.
| Key | Value description | Value example |
|---|---|---|
| "components" | <indices of components that the occupants can or cannot access> | [0,4,1] |
| "action" | _<whether the components are accepted or rejected. Possible values are "accept" and "reject"> _ | "reject" |
This section defines shapes of occupants, both for polygonal and cylindrical occupants.
[occshapes] type height attachedAgentsPositions anim model ...
| type | poly <number of points> <space separated x, y, z coordinates of points> |
| height | <height in meters> |
| attachedAgentsPositions | <number of attachment positions> <space separated x, y, z coordinates of attachment positions> |
| anim | <animation> |
| model | <3D model> |
Example of a polygonal occupant shape:
0: type=poly 4 -0.66 -0.38 0.0 0.66 -0.38 0.0 0.66 0.38 0.0 -0.66 0.38 0.0, height=1, attachedAgentsPositions=1 -0.71 0.0 0.0, anim=wheelchair, model=props/Wheelchair/Wheelchair.bea
| type | cylinder |
| diameter | <diameter in meters> |
| height | <height in meters> |
| [optional] | |
| diameterdist | <index of diameter distribution> |
| heightdist | <index of height distribution> |
| geomdiameter | <geometry diameter in meters> |
Example of a cylindrical occupant shapes:
1: type=cylinder, diameterdist=10, height=1.8288, geomradius=0.33 2: type=cylinder, diameter=.42, heightdist=3
This section defines assisted evacuation teams.
[assisted-evac-teams] goals name ...
| goals | <bar separated list of occupant ids OR NA if the order to assist is not specified> |
| name | <name of the assisted evacuation team> |
Example of an assisted evacuation team line:
1: goals=3|1,name=AETeam00
[occupant-sources] key value ...
This section defines occupant sources. Occupant sources are stored in a JSON key-value format. Following table shows available keys and values for the occupant sources.
| Key | Value description | Value example |
|---|---|---|
| "name" | <name of the occupant source> | "OccSource00" |
| "component" | <index of a node to which the source is attached> | 2 |
| "behaviors" | <distribution of behaviors> | see the example below |
| "profiles" | <distribution of profiles> | see the example below |
| "bounds" | <bounding box of the occupant source specified by min and max points> | see the example below |
| "flowrate" | <index of the flow rate function> | 3 |
| "enforceFlowrate" | <whether the flow rate should be enforced regardless of occupants in the way> | false |
Example of an occupant source line:
1: {"component":13,"behaviors":{"urn":[{"2":0.4},{"0":0.6}]},"enforceFlowrate":false,"name":"OccSource01","profiles":{"urn":[{"0":0.25},{"1":0.25},{"2":0.25},{"3":0.25}]},"bounds":{"min":"(-3.0686769149632847, 5.422381629126958, 0.0)","max":"(-2.2558769149632854, 5.422381629126958, 0.0)"},"flowrate":4}[tags] key value ...
Tags sources are stored in a JSON key-value format. Following table shows available keys and values for the tags.
| Key | Value description | Value example |
|---|---|---|
| "name" | <name of the tag> | "last_goal_started" |
| "desc" | <description of the tag> | "Last goal started" |
| "predefined" | <whether the tag is predefined. Predefined tags include: finished, exited, report_refuge_reached> | false |
Example of a tag line:
0: {"name":"last_goal_started","predefined":false,"desc":"Last goal started"}[occupants] key value ...
This section describes the occupants present at the beginning of the simulation. The starting node for each occupant is inferred based on the location of the occupant. Occupants' properties are stored in a JSON key-value format. Only properties that differ from the properties of an occupant’s profile are stored in the occupants section. The following table shows only properties that must be always present, since there are no matching profile properties (or for implementation reasons). All Profile properties can also be defined for individual occupants. However, curves are replaced with specific values, and units are omitted. It is assumed that these values are entered in SI units.
| Key | Value description | Value example |
|---|---|---|
| "name" | <name of the occupant> | "00001" |
| "id" | <id of the occupant> | 0 |
| "behavior" | <index of the behavior of the occupant> | 1 |
| "loc" | <initial location of the occupant> | "-2.1 -0.3 0.0" |
| "OccProfile.REAC_TIME" | <reaction time of the occupant> | "0.1" |
| "OccProfile.DIST_TRAVELLED_DOUBLE_DIST" | <current room distance penalty> | " 0.019" |
In addition to the previous properties, the following may optionally be specified per-occupant to override the occupant shape as a cylinder:
| Key | Value description | Value example |
|---|---|---|
| "OccProfile.DIAMETER" | <diameter of the occupant in meters> | ".4" |
| "OccProfile.GEOM_DIAMETER" | <geometry diameter of the occupant in meters> | ".33" |
| "OccProfile.HEIGHT" | <height in meters> | "1.8" |
Example of an occupant line:
0: {"OccProfile.DIAMETER":".5","loc":"-2.017382141545266 -0.32021938754686585 0.0","OccProfile.CURR_DOOR_PREF":"0.55","profile":0,"name":"00001","OccProfile.PRIORITY_LEVEL":"0.34669095427694063","OccProfile.DIST_TRAVELLED_DOUBLE_DIST":"0.002272613706753919","id":0,"behavior":0,"OccProfile.REAC_TIME":"0.1","rseed":7327679609280221184,"OccProfile.MAXVEL":"1.51234"}Elevators are defined in following sections.
The following section (optional) contains elevator information.
[elevators] key value ...
Elevators are stored in a JSON key-value format. Following table shows available keys and values for the elevators.
| Key | Value description | Value example |
|---|---|---|
| "name" | <name of the elevator> | "Elevator01" |
| "id" | <id of the elevator> | 0 |
| "initial_floor" | <id of the elevator room that the elevator will be at when the simulation starts> | 0 |
| "double_deck" | <whether the elevator is a double-deck elevator> | false |
| "lower_deck_discharge" | <lower deck discharge id of a double-deck elevator, only available for double-deck elevators> | 6 |
| "upper_deck_discharge" | <upper deck discharge id of a double-deck elevator, must be directly above the lower deck discharge, only available for double-deck elevators> | 7 |
The following section contains further elevator information.
[elevator-discharge] discharge open-time close-delay size-factor max-density ...
| discharge: int | index of discharge node |
| open-time: double | minimum time the elevator doors are open for pickup (s) |
| close-delay: double | delay between the last entering occupant and the doors closing for pickup (s) |
| size-factor: double | always 0.0 |
| max-density: double | nominal load/elevator area |
The following section contains information specific to elevator levels.
[elevator-level-data] elevator-id pickup level-id open-time close-time pickup-time discharge-time delay ...
elevator-id: int | index of the elevator |
pickup: int | index of pickup level node |
level-id: int | index of floor |
open-time: double | time it takes to open the doors (s) |
close-time: double | time it takes to close the doors (s) |
pickup-time: double | time it takes to go from the discharge floor to the pickup floor, excluding door open/close times (s) |
discharge-time: double | time it takes to go from the pickup floor to the discharge floor, excluding door open/close times (s) |
delay: double | delay for when this level can start picking up occupants (s) |
The following optional section defines linked elevators.
[elevator-links] <comma separated list of elevator indices> ...
The following optional section defines level priorities of an elevator.
[elevator-priority] elevator-id, <comma separated list of elevator level indices> ...
Lines beginning with the comment character ("#") will be ignored.
Lines are considered to be delimited by spaces and commas. Strings containing spaces and commas should be enclosed in double-quotes. The following three VERT definitions are identical to inferno.
1, 1, 0 1.0 1. 0. 1, 1 0
Chapter 8 of the Pathfinder User Manual describes how to save camera positions (Views) that can be recalled later and to create Camera Tours that allow flythrough animations of a model. The data defining these views and tours is contained in the view.json file. This file uses the JSON name/value pairs and ordered list format.
| Name | Value description |
|---|---|
"name" | Name of the view. |
"type" | "camera_view" |
"state" | Data that defines the view. This is a list. |
"loc" | XYZ coordinates of camera |
"ref" | XYZ coordinates of point camera is looking at. |
"up" | Vector that defines up direction (should be orthogonal to view direction from location to reference). |
"zoom" | Factor >0 that results from mouse scroll wheel movement. |
"zoomloc" | Screen location of cursor when scroll wheel was zoomed. |
"near" | Not used. |
"far" | Not used. |
"near" | Not used |
"fov" | Field of view in radians. |
A Tour object contains the following pairs:
| Name | Value description |
|---|---|
"name" | Name of the tour. |
"type" | "camera_script" |
"tstart" | Start time of the tour |
"loop" | Tour returns to first view. |
"repeat" | Repeat sequence. |
"crsalpha" | Controls shape of camera path between tour views. 0.0→Uniform, 0.5→Centripetal, 1.0→Chordal. |
"node" | Data that defines the tour. This is a list that includes the view parameters. |
"treach" | Amount of time to reach the node. |
"twait" | Amount of time to wait at the node. |
Pathfinder computes a maximum walking speed for occupants in smoke based on the relationships in (Fridolf et al. 2019). An occupant’s maximum walking speed in Pathfinder begins to decrease linearly, starting at a 3 m visibility, until an occupant reaches a 0.2 m/s minimum walking speed. This is described by the formula:
Where:
\(w\) = The maximum walking speed of an occupant in smoke.
\(w_{\text{smoke-free}}\) = The maximum walking speed of an occupant in normal conditions.
\(x\) = The visibility (in meters) at the occupant’s location as output by FDS.
The Pathfinder calculation of Fractional Effective Dose (FED) uses the equations described in the SFPE Handbook of Fire Protection Engineering, 5th Edition, Vol 3, Chapter 63, pages 2308-2428 (SFPE 2016). The implementation is the same as used in FDS+EVAC (Korhonen 2018), using only the concentrations of the asphyxiant gases \(CO\), \(CO_{2}\), and \(O_{2}\) to calculate the FED value. See the FDS User’s Guide (McGrattan et al. 2021) for more information about FED calculations in FDS.
\(FED_{tot} = FED_{CO} \times V_{CO_{2}} + FED_{O_{2}}\)
This calculation does not include the effect of hydrogen cyanide (\(HCN\)) and the effect of \(CO_{2}\) is only due to hyperventilation. Carbon dioxide does not have toxic effects at concentrations of up to 5%, but it stimulates breathing which increases the rate at which the other fire products are taken up.
The fraction of an incapacitating dose of \(CO\) is calculated as (SFPE equation 63.18):
\(FED_{CO} = 3.317 \times 10^{-5}\left\lbrack CO \right\rbrack^{1.036}\left( V \right)\left( t \right)/D\)
Where:
\(CO\) = Carbon monoxide concentration (ppm v/v 20° C)
\(V\) = Volume of air breathed each minute (L/min). Value is 25 L/min for an activity level of light work - walking to escape.
\(t\) = Time (minutes)
\(D\) = Exposure dose (percent \(COHb\)). Value is 30% for an activity level of light work (walking to escape).
Hyperventilation due to carbon dioxide can increase the rate at which other toxic fire products (such as \(CO\)) are taken up. The multiplication factor is given by (SFPE equation 63.34):
\(V_{CO_{2}} \) = \(exp(0.1903 \times \%CO_{2} + 2.0004)/7.1\)
Where:
\(\%CO_{2}\) = volume fraction of \(CO_{2}\) (v/v)
The fraction of an incapacitating dose of low \(O_{2}\) hypoxia is calculated as (SFPE equations 63.27 and 63.30):
\(FED_{O_{2}} = \frac{t}{exp\lbrack 8.13 - 0.54(20.9 - \% O_{2})\rbrack}\)
where:
\(t\) = Time (minutes)
\(\%O_{2}\) = volume fraction of \(O_{2}\) (v/v)
The design of this equation has the consequence of giving non-zero values for low-oxygen hypoxia even in conditions considered to be safe. At an oxygen concentration of 20.9% (sea level), this equation gives \(FED_{O_{2}}\) of 1.0 after 2.36 days. At an oxygen concentration of 20.78% (FDS default AIR species), this equation gives \(FED_{O_{2}}\) of 1.0 after 2.21 days.
For reference, (OSHA 1995) places the low-oxygen limit for safe working conditions at 19.5% and (Purser 2010) states that "most people can tolerate hypoxia due to low inhaled oxygen concentrations down to around 11% inspired oxygen without suffering serious effects".
To prevent misleading FED accumulation on occupants that are in safe conditions, Pathfinder allows a limit to be specified in the user interface to control when the \(FED_{O_{2}}\) term will contribute FED - in terms of an upper bound on oxygen concentration. The default value is 19.5%.
Since the concentrations of \(CO\), \(CO_{2}\), and \(O_{2}\) vary with time and space, the equations are integrated using the current exposure of the occupant to calculate FED.
The measurement location for FED quantity sampling is 90% of occupant height. For example, FED data for an occupant with height=1.8 meters would be sampled 1.62 meters above the occupant’s location. When the occupant is not inside an FDS mesh, the FED calculation is paused until the occupant enters another mesh.
The calculation of density and velocity in measurement regions uses an implementation of Steffen and Seyfried’s Voronoi diagram-based method (Steffen and Seyfried 2010). In this method a Voronoi diagram is created to divide space among occupants. Each occupant’s density is calculated based on the size of their cell in the Voronoi diagram. These densities are then combined using a weighted average, where the weights are the portion of the measurement area that intersects the Voronoi cell.
Occupants whose location is up to 1.41 meters outside the measurement region will contribute to the measurement, but more distant agents will be ignored.
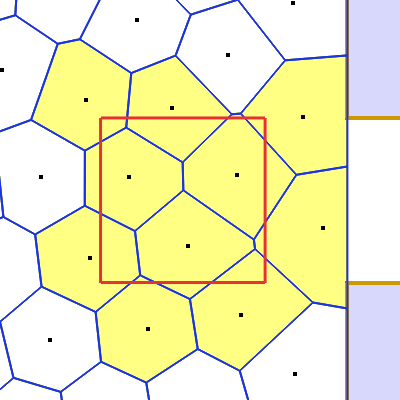
The 1.41 meter range corresponds to a 4 m2 square maximum area of influence for each occupant.
Amor, Heni Ben, Jan Murray, Oliver Obst, and others. 2006. Fast, Neat, and under Control: Arbitrating between Steering Behaviors. AI Game Programming Wisdom. Vol. 3.
Firth, Paul. 2011. “Collision Detection for Dummies (Wayback).” https://web.archive.org/web/20190801002050/https://wildbunny.co.uk/blog/2011/04/20/collision-detection-for-dummies/.
Fridolf, Karl, Enrico Ronchi, Daniel Nilsson, and Håkan Frantzich. 2019. “The Representation of Evacuation Movement in Smoke- Filled Underground Transportation Systems.” Tunnelling and Underground Space Technology 90 (April): 28–41. https://doi.org/10.1016/j.tust.2019.04.016.
Fruin, J.J., and G.R. Strakosch. 1987. Pedestrian Planning and Design. Elevator World. https://books.google.com/books?id=vrckAQAAMAAJ.
Hart, Peter E., Nils J. Nilsson, and Bertram Raphael. 1968. “A Formal Basis for the Heuristic Determination of Minimum Cost Paths.” IEEE Trans. Systems Science and Cybernetics 4: 100–107.
IMO. 2016. “IMO Guidelines for Evacuation Analysis for New and Existing Passenger Ships. MSC.1/Circ.1533.” 4 Albert Embankment, London, Great Britain: International Maritime Organization.
Johnson, Geraint. 2006. Smoothing a Navigation Mesh Path. AI Game Programming Wisdom. Vol. 3.
Korhonen, Timo. 2018. Fire Dynamics Simulator with Evacuation: FDS+Evac, Technical Reference and User’s Guide. Sixth Edition. VTT Technical Research Centre of Finland: VTT. http://virtual.vtt.fi/virtual/proj6/fdsevac/documents/FDS+EVAC_Guide.pdf.
Kuligowski, Erica D., Richard D. Peacock, and Bryan L. Hoskins. 2010. “A Review of Building Evacuation Models, 2nd Edition.” Technical Note (NIST TN). National Institute of Standards and Technology, Gaithersburg, Maryland, USA, and Lund University, Lund, Sweden. https://www.nist.gov/publications/review-building-evacuation-models-2nd-edition.
McGrattan, Kevin, Simo Hostikka, Randall McDermott, Jason Floyd, and Marcos Vanella. 2021. Fire Dynamics Simulator User’s Guide, NIST Special Publication 1019. Sixth Edition. National Institute of Standards and Technology, Gaithersburg, Maryland, USA: NIST.
OSHA. 1995. “Precautions and the Order of Testing before Entering Confined and Enclosed Spaces and Other Dangerous Atmospheres.” Occupational Safety and Health Administration. United States Department of Labor: OSHA. https://www.osha.gov/laws-regs/regulations/standardnumber/1915/1915.12.
Purser, D.A. 2010. “4 - Asphyxiant Components of Fire Effluents.” In Fire Toxicity, edited by Anna Stec and Richard Hull, 118–98. Woodhead Publishing. https://doi.org/10.1533/9781845698072.2.118.
Reinolds, C. 1999. “Steering Behaviors For Autonomous Characters.” In Proceedings of the Game Developers Conference 1999, 763–82. Miller Freeman Game Group, San Francisco, California, USA.
SFPE. 2016. SFPE Handbook of Fire Protection Engineering. 5th ed. Springer-Verlag New York. https://www.springer.com/us/book/9781493925643.
———. 2019. SFPE Guide to Human Behavior in Fire. 2nd ed. Springer International Publishing. https://www.springer.com/gp/book/9783319946962.
Steffen, B., and A. Seyfried. 2010. “Methods for Measuring Pedestrian Density, Flow, Speed and Direction with Minimal Scatter.” Physica A: Statistical Mechanics and Its Applications 389 (9): 1902–10. https://doi.org/10.1016/j.physa.2009.12.015.